Фундаментальные исследования. Испытания электронных регуляторов сау гтд Обзор систем автоматического управления гтд
Владельцы патента RU 2446298:
Использование: в системах автоматического управления (САУ) газотурбинных двигателей (ГТД). Технический результат: адаптивное управление различными выходными координатами ГТД с помощью селектора каналов и контура сигнальной самонастройки, в результате чего устраняются забросы выходных координат двигателя, обеспечивается заданное качество переходных процессов включаемого канала САУ, что способствует повышению ресурса ГТД. Система дополнительно содержит последовательно соединенные селектор максимального сигнала, третий элемент сравнения, блок согласования, переключатель и второй суммирующий элемент, причем первый и второй входы селектора максимального сигнала соединены соответственно с первым и вторым входами селектора минимального сигнала, выход которого соединен со вторым входом третьего элемента сравнения, выход первого элемента сравнения соединен со вторым входом второго суммирующего элемента, выход которого подключен к входу регулятора частоты вращения ротора, выход логического устройства соединен со вторым входом переключателя, второй выход которого подключен к второму входу первого суммирующего элемента. 2 ил.
Изобретение относится к области систем автоматического управления (САУ) газотурбинного двигателя (ГТД).
Известна САУ ГТД, в которой для устранения отрицательного влияния взаимодействия регуляторов на характеристики системы управления с одним регулирующим фактором содержатся измерители частоты вращения ротора ГТД и температуры газа, регуляторы этих параметров, селектор минимального сигнала, исполнительное устройство, воздействующее на расход топлива .
Недостатком этой схемы является то, что взаимодействие каналов управления сохраняется на переходных режимах. Эта САУ ГТД имеет невысокую динамическую точность и заброс по температуре при селектировании, что можно объяснить следующим образом.
ГТД имеет различные динамические характеристики по разным выходным координатам объекта управления относительно расхода топлива.
Рассмотрим САУ ГТД как двухмерный объект с одним управляющим воздействием, в котором используется алгебраический селектор минимального сигнала. Первый канал этой САУ является каналом управления, определяющим режим работы объекта по выходной координате Y 1 , его заданная величина Y 10 зависит от времени. Второй канал - канал ограничения, его заданная величина Y 20 является постоянной и определяет максимальный режим работы объекта по координате Y 2 .
Передаточные функции объекта управления:
по координате Y 1:
по координате Y 2:
где p - оператор преобразования Лапласа;
K 1 , K 2 - коэффициенты передачи;
A 1 (p), A 2 (p), B(p) - полиномы, зависящие от вида объекта.
Примем, что порядок A 1 (p) меньше, чем порядок В(р), а порядок A 2 (p) равен порядку В(p). Такое математическое описание характерно, например, для динамических характеристик ГТД по частоте вращения ротора и температуре газа при изменении расхода топлива в камеру сгорания.
Передаточная функция общего изодромного регулятора
Передаточные функции регулятора первого - W 1 (p) и второго - W 2 (p) каналов выбираются исходя из заданных требований к динамическим характеристикам каждого из них. Это можно сделать следующим образом. Потребуем, чтобы передаточные функции отдельных разомкнутых каналов без учета запаздывания измерителей координат удовлетворяли равенствам:
где W м1 (p) и W м2 (p) - передаточные функции эталонных моделей
разомкнутых каналов. Тогда
Если передаточные функции отдельных разомкнутых каналов выбрать в виде
то для получения необходимого качества регулирования выходных координат регуляторы, согласно (6) и (7), должны иметь, например, следующие передаточные функции:
При этом инерционность датчика температуры должна быть скорректирована так, чтобы измерители параметров были безынерционными.
Как известно , обычно применяется принцип селектирования, согласно которому регулируется параметр ГТД, наиболее приблизившийся к величине, определяемой программой регулирования. Следовательно, для получения необходимого качества регулирования переключение селектора должно происходить в момент равенства рассогласований между текущими значениями выходных координат и их задающими значениями, т.е. в момент равенства сигналов перед регуляторами
Проведенный анализ показывает, что регулятор температуры газа является инерционным по отношению к регулятору частоты вращения ротора ГТД, поэтому селектор переключается с канала частоты вращения ротора на канал температуры газа с запаздыванием. В результате происходит заброс по температуре газа.
Наиболее близкой по достигаемому техническому результату, выбранной за ближайший аналог, является САУ ГТД, содержащая каналы регулирования частоты вращения ротора и температуры газа, селектор минимального сигнала, исполнительное устройство, два корректирующих звена, два суммирующих элемента, логическое устройство (компаратор) и ключ .
В этой САУ за счет включения двух перекрестных корректирующих звеньев с передаточными функциями
происходит изменение задающего воздействия разомкнутого канала ограничения температуры газа и выполнение условия
при переключении САУ на канал ограничения температуры газа при равенстве сигналов на входах селектора минимального сигнала
Это позволяет получить необходимое качество переходного процесса по температуре газа при включении этого канала.
Недостатком такой САУ является то, что при обратном переключении с канала температуры газа на канал частоты вращения ротора структура, параметры корректирующих звеньев и место включения корректирующего сигнала должны изменяться, т.е. эта система не является адаптивной к изменению ее структуры при селектировании каналов и не обеспечивает в этом случае заданного качества переходных процессов.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение динамических характеристик САУ путем устранения забросов и обеспечения заданного качества переходных процессов по выходным координатам ГТД при прямом и обратном включении селектором различных каналов системы, что приводит к улучшению качества системы управления и к повышению ресурса работы двигателя.
Решение поставленной задачи достигается тем, что в систему автоматического управления газотурбинного двигателя, содержащую последовательно соединенные регулятор частоты вращения ротора, селектор минимального сигнала, изодромный регулятор, газотурбинный двигатель, измеритель частоты вращения ротора и первый элемент сравнения, задатчик частоты вращения ротора, выход которого подключен к второму входу первого элемента сравнения, последовательно соединенные измеритель температуры газа, второй элемент сравнения, первый суммирующий элемент, регулятор температуры газа и логическое устройство, задатчик температуры газа, выход которого подключен к второму входу второго элемента сравнения, причем выход регулятора частоты вращения ротора соединен со вторым входом логического устройства, выход регулятора температуры газа соединен со вторым входом селектора минимального сигнала, а второй выход газотурбинного двигателя соединен с входом измерителя температуры газа, в отличие от прототипа дополнительно введены последовательно соединенные селектор максимального сигнала, третий элемент сравнения, блок согласования, переключатель и второй суммирующий элемент, причем первый и второй входы селектора максимального сигнала соединены соответственно с первым и вторым входами селектора минимального сигнала, выход которого соединен со вторым входом третьего элемента сравнения, выход первого элемента сравнения соединен со вторым входом второго суммирующего элемента, выход которого подключен к входу регулятора частоты вращения ротора, выход логического устройства соединен со вторым входом переключателя, второй выход которого подключен к второму входу первого суммирующего элемента.
Существо системы поясняется чертежами. На фиг.1 представлена блок-схема системы автоматического управления газотурбинного двигателя; на фиг.2 - результаты моделирования переходных процессов в САУ ГТД при различных переключениях каналов селектором минимального сигнала:
а) с канала частоты вращения ротора на канал температуры газа, б) с канала температуры газа на канал частоты вращения ротора, с контуром и без контура адаптации, при этом выходные координаты ГТД представлены в относительном виде
Система автоматического управления газотурбинного двигателя содержит последовательно соединенные регулятор частоты вращения ротора 1, селектор минимального сигнала 2, изодромный регулятор 3, газотурбинный двигатель 4, измеритель частоты вращения ротора 5 и первый элемент сравнения 6, задатчик частоты вращения ротора 7, выход которого подключен к второму входу первого элемента сравнения 6, последовательно соединенные измеритель температуры газа 8, второй элемент сравнения 9, первый суммирующий элемент 10, регулятор температуры газа 11 и логическое устройство 12, задатчик температуры газа 13, выход которого подключен к второму входу второго элемента сравнения 9, причем выход регулятора частоты вращения ротора 1 соединен со вторым входом логического устройства 12, выход регулятора температуры газа 11 соединен со вторым входом селектора минимального сигнала 2, а второй выход газотурбинного двигателя 4 соединен с входом измерителя температуры газа 8, при этом система дополнительно содержит последовательно соединенные селектор максимального сигнала 14, третий элемент сравнения 15, блок согласования 16, переключатель 17 и второй суммирующий элемент 18, причем первый и второй входы селектора максимального сигнала 14 соединены соответственно с первым и вторым входами селектора минимального сигнала 2, выход которого соединен со вторым входом третьего элемента сравнения 15, выход первого элемента сравнения 6 соединен со вторым входом второго суммирующего элемента 18, выход которого подключен к входу регулятора частоты вращения ротора 1, выход логического устройства 12 соединен со вторым входом переключателя 17, второй выход которого подключен к второму входу первого суммирующего элемента 10.
Система автоматического управления газотурбинного двигателя работает следующим образом.
В канале регулирования частоты вращения ротора ГТД 4 сигнал с измерителя частоты вращения ротора 5, пропорциональный частоте вращения ротора, поступает на первый элемент сравнения 6, где сравнивается с выходным сигналом задатчика частоты вращения ротора 7 и формируется выходной сигнал рассогласования E 1 , пропорциональный отклонению частоты вращения ротора от заданного значения. Этот сигнал через второй суммирующий элемент 18 поступает на вход регулятора частоты вращения ротора 1, выход которого U 1 подключен к первому входу селектора минимального сигнала 2.
В канале регулирования температуры газа ГТД 4 сигнал с измерителя температуры газа 8, пропорциональный температуре газа, поступает на второй элемент сравнения 9, где сравнивается с выходным сигналом задатчика температуры газа 7 и формируется выходной сигнал рассогласования E 2 , пропорциональный отклонению температуры газа от заданного значения. Этот сигнал через первый суммирующий элемент 10 поступает на вход регулятора температуры газа 11, выход которого U 2 подключен к второму входу селектора минимального сигнала 2.
На выход селектора минимального сигнала 2 проходит выходной сигнал
того канала регулирования, который в данный момент по условиям работы ГТД требует меньшего расхода топлива. Сигнал с селектора минимального сигнала 2 через изодромный регулятор 3, который выполняет функцию и исполнительного устройства, изменяет расход топлива в камеру сгорания газотурбинного двигателя 4.
Выходные сигналы регулятора частоты вращения ротора 1 U 1 и регулятора температуры газа 11 U 2 поступают на входы селектора максимального сигнала 14, на выходе которого формируется сигнал
На выходе третьего элемента сравнения 15 определяется разность сигналов на выходе регуляторов
где U зам - выходной сигнал регулятора замкнутого канала;
U раз - выходной сигнал регулятора разомкнутого канала.
Выходные сигналы U 1 и U 2 поступают также на вход логического устройства 12, на выходе которого формируется логический сигнал L, определяющий замкнутый канал САУ
Выходной сигнал ε третьего элемента сравнения 15 через блок согласования 16 и переключатель 17 поступает на вход соответствующего регулятора разомкнутого канала с помощью первого 10 или второго 18 суммирующего элемента, что определяется состоянием переключателя 17 в соответствии с логическим сигналом L логического устройства 12. Так как ε меньше нуля, то этот сигнал уменьшает задающее воздействие разомкнутого канала и тем самым корректирует момент переключения каналов.
Как было отмечено выше, регуляторы частоты вращения ротора 1 и температуры газа 11 имеют разные динамические характеристики, в результате чего условие переключения селектора минимального сигнала 2
отличается от необходимого эталонного условия переключения САУ - равенства рассогласований между текущими значениями выходных координат и их задающими воздействиями
Следовательно, необходимо согласование этих условий. Как известно , согласование поведения отдельных каналов САУ возможно за счет контура управления их относительным движением. В данном случае оно обеспечивается за счет введения контура сигнальной самонастройки по разности сигналов ε на выходе регуляторов с воздействием на задающее воздействие разомкнутого канала системы. Это позволяет построить САУ ГТД, адаптивную к изменению ее структуры при переключении каналов селектором.
Пусть замкнутым является канал регулирования частоты вращения ротора, т.е. первый канал. Тогда выход контура сигнальной самонастройки включен с помощью первого суммирующего элемента 10 на вход регулятора температуры газа 11 второго разомкнутого канала.
Сигнал на выходе регулятора частоты вращения ротора
Сигнал на выходе регулятора температуры газа
где W c (p) - передаточная функция блока согласования 16.
Тогда разность сигналов на выходе регуляторов
При W c (p), равном K, и K, достаточно большом, получаем
ε→0; U 2 →U 1 ,
где m - достаточно малая величина.
Таким образом, за счет работы контура сигнальной самонастройки момент переключения селектора минимального сигнала 2
приближается к условию переключения каналов по ошибкам каналов
Это, соответственно, позволяет ликвидировать заброс и обеспечить необходимое качество переходного процесса при замыкании и включении в работу регулятора температуры газа 11. При U 1 , равном U 2 , происходит переключение каналов, и далее при U 1 , большем по сравнению с U 2 , - изменение состояния каналов: первый канал становится разомкнутым, а второй канал - замкнутым. Это приводит к изменению также и структуры контура самонастройки.
Аналогичные процессы характерны для САУ и при переключении селектора с замкнутого канала температуры газа на канал частоты вращения ротора. В этом случае выходной сигнал контура самонастройки включается с помощью переключателя 17 и второго суммирующего элемента 18 на вход регулятора частоты вращения ротора 1, изменяя задающее воздействие первого канала.
Так как порядок знаменателей передаточных функций отдельных регуляторов W 1 (p) и W 2 (p) двухвального ГТД не выше двух, то контур самонастройки обеспечивает хорошее качество переходных процессов при достаточно высоких значениях коэффициента передачи K.
Результаты моделирования рассмотренной САУ ГТД, приведенные на фиг.2, при задающих воздействиях каналов
![]()
и выполнении условия (8) показывают, что при прямом и обратном переключении каналов селектором качество переходных процессов включаемого канала существенно улучшается при введении контура самонастройки. САУ сохраняет заданное качество при изменении структуры, т.е. является адаптивной.
Итак, заявляемое изобретение позволяет осуществить адаптивное управление различными выходными координатами ГТД с помощью селектора каналов и контура сигнальной самонастройки. Устраняются забросы выходных координат двигателя, обеспечивается заданное качество переходных процессов включаемого канала системы, что способствует повышению ресурса ГТД.
Источники литературы
1. Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. - М.: Машиностроение, 1983. - 283 с., стр.126, рис.3.26.
2. Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. - М.: Машиностроение, 1983. - 283 с., стр.110.
3. Свидетельство РФ №2416 на полезную модель. МПК 6 F02C 9/28. Система автоматического регулирования газотурбинного двигателя. / В.И.Петунин, А.И.Фрид, В.В.Васильев, Ф.А.Шаймарданов. Заявка №95108046; заявл. 18.05.95; опубл. 16.07.96; Бюл. №7.
4. Мирошник И.В. Согласованное управление многоканальными системами. - Л.: Энергоатомиздат, 1990. - 128 с., стр.21, рис.1.8.
Система автоматического управления газотурбинного двигателя, содержащая последовательно соединенные регулятор частоты вращения ротора, селектор минимального сигнала, изодромный регулятор, газотурбинный двигатель, измеритель частоты вращения ротора и первый элемент сравнения, задатчик частоты вращения ротора, выход которого подключен ко второму входу первого элемента сравнения, последовательно соединенные измеритель температуры газа, второй элемент сравнения, первый суммирующий элемент, регулятор температуры газа и логическое устройство, задатчик температуры газа, выход которого подключен ко второму входу второго элемента сравнения, причем выход регулятора частоты вращения ротора соединен со вторым входом логического устройства, выход регулятора температуры газа соединен со вторым входом селектора минимального сигнала, а второй выход газотурбинного двигателя соединен с входом измерителя температуры газа, отличающаяся тем, что дополнительно содержит последовательно соединенные селектор максимального сигнала, третий элемент сравнения, блок согласования, переключатель и второй суммирующий элемент, причем первый и второй входы селектора максимального сигнала соединены соответственно с первым и вторым входами селектора минимального сигнала, выход которого соединен со вторым входом третьего элемента сравнения, выход первого элемента сравнения соединен со вторым входом второго суммирующего элемента, выход которого подключен к входу регулятора частоты вращения ротора, выход логического устройства соединен со вторым входом переключателя, второй выход которого подключен ко второму входу первого суммирующего элемента.
ВВЕДЕНИЕ
Газотурбинные двигатели (ГТД) за шестьдесят лет своего развития стали основным типом двигателей для воздушных судов современной гражданской авиации. Газотурбинные двигатели - классический пример сложнейшего устройства, детали которого работают длительное время в условиях высоких температур и механических нагрузок. Высокоэффективная и надежная эксплуатация авиационных газотурбинных силовых установок современных воздушных судов невозможна без применения специальных систем автоматического управления (САУ). Крайне важно отслеживать рабочие параметры двигателя, управлять ими для обеспечения высокой надежности работы и длительного срока его эксплуатации. Следовательно, огромную роль играет выбор автоматической системы управления двигателем.
В настоящее время в мире широко используются воздушные суда, на которых устанавливаются двигатели V поколения, оборудованные новейшими системами автоматического управления типа FADEC (Full Authority Digital Electronic Control). На авиационных газотурбинных двигателях первых поколений устанавливались гидромеханические САУ.
Гидромеханические системы прошли долгий путь развития и совершенствования, начиная от простейших, основанных на управлении подачей топлива в камеру сгорания (КС) при помощи открытия/закрытия отсечного клапана (вентиля), до современных гидроэлектронных, в которых все основные функции регулирования производятся с помощью гидромеханических счётно-решающих устройств, и только для выполнения некоторых функций (ограничение температуры газа, частоты вращения ротора турбокомпрессора и др.) используются электронные регуляторы. Однако сейчас этого не достаточно. Для того, чтобы соответствовать высоким требованиям безопасности и экономичности полетов, необходимо создавать полностью электронные системы, в которых все функции регулирования выполняются средствами электронной техники, а исполнительные органы могут быть гидромеханическими или пневматическими. Такие САУ способны не просто контролировать большое число параметров двигателя, но и отслеживать их тенденции, управлять ими, тем самым, согласно установленным программам, задавать двигателю соответствующие режимы работы, взаимодействовать с системами самолета для достижения максимальной эффективности. Именно к таким системам относится САУ FADEC.
Серьезное изучение устройства и работы систем автоматического управления авиационных ГТД является необходимым условием правильности оценки технического состояния (диагностики) АС управления и их отдельных элементов, а также безопасной эксплуатации САУ авиационных газотурбинных силовых установок в целом.
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АВИАЦИОННЫМИ ГТД
Назначение систем автоматического управления
газотурбинный двигатель топливо управление
САУ предназначена для (рис. 1):
Управления запуском двигателя и его выключения;
Управления режимом работы двигателя;
Обеспечения устойчивой работы компрессора и камеры сгорания (КС) двигателя на установившихся и переходных режимах;
Предотвращения превышения параметров двигателя выше предельно допустимых;
Обеспечения информационного обмена с системами самолета;
Интегрированного управления двигателем в составе силовой установки самолета по командам из самолетной системы управления;
Обеспечения контроля исправности элементов САУ;
Оперативного контроля и диагностирования состояния двигателя (при объединенной САУ и системы контроля);
Подготовки и выдачи в систему регистрации информации о состоянии двигателя.
Обеспечение управлением запуска двигателя и его выключением. На запуске САУ выполняет следующие функции:
Управляет подачей топлива в КС, направляющим аппаратом (НА), перепусками воздуха;
Управляет пусковым устройством и агрегатами зажигания;
Защищает двигатель при помпаже, срывах в компрессоре и от перегрева турбины;
Защищает пусковое устройство от превышения предельной частоты вращения.
Рис. 1.
САУ обеспечивает выключение двигателя с любого режима работы по команде пилота или автоматически при достижении предельных параметров, кратковременное прекращение подачи топлива в основную КС при потере газодинамической устойчивости компрессора (ГДУ).
Управление режимом работы двигателя. Управление производится по командам пилота в соответствии с заданными программами управления. Управляющим воздействием является расход топлива в КС. При управлении поддерживается заданный параметр регулирования с учетом параметров воздуха на входе в двигатель и внутридвигательных параметров. В многосвязных системах управления также может управляться геометрия проточной части для реализации оптимального и адаптивного управления с целью обеспечения максимальной эффективности комплекса «СУ - летательный аппарат».
Обеспечение устойчивой работы компрессора, КС двигателя на установившихся и переходных режимах. Для устойчивой работы компрессора и КС осуществляется автоматическое программное управление подачей топлива в камеру сгорания на переходных режимах, управление клапанами перепуска воздуха из компрессора или за компрессором, управление углом установки поворотных лопаток ВНА и НА компрессора. Управление обеспечивает протекание линии рабочих режимов с достаточным запасом газодинамической устойчивости компрессора (вентилятора, подпорных ступеней, КНД и КВД). Для предотвращения превышения параметров при потере ГДУ компрессора применяется противопомпажная и противосрывная системы.
Предотвращение превышения параметров двигателя выше предельно допустимых. Под предельно допустимыми понимаются максимально возможные параметры двигателя, ограниченные по условиям выполнения дроссельных и высотно-скоростных характеристик. Длительная работа на режимах с предельно допустимыми параметрами не должна приводить к разрушению деталей двигателя. В зависимости от конструкции двигателя автоматически ограничиваются:
Предельно допустимая частота вращения роторов двигателя;
Предельно допустимое давление воздуха за компрессором;
Максимальная температура газа за турбиной;
Максимальная температура материала рабочих лопаток турбины;
Минимальный и максимальный расход топлива в КС;
Предельно допустимая частота вращения турбины пускового устройства.
В случае раскрутки турбины при обрыве ее вала производится автоматическое выключение двигателя с максимально возможным быстродействием клапана отсечки топлива в КС. Может быть применен электронный датчик, фиксирующий превышение пороговой частоты вращения, или механическое устройство, которое фиксирует взаимное окружное смещение валов компрессора и турбины и определяет момент обрыва вала для выключения подачи топлива. При этом управляющие устройства могут быть электронными, электромеханическими или механическими.
В конструкции САУ должны быть предусмотрены надсистемные средства защиты двигателя от разрушений при достижении предельных параметров в случае выхода из строя основных каналов управления САУ. Может быть предусмотрен отдельный агрегат, который при достижении предельного для надсистемного ограничения значения какого-либо из параметров с максимальным быстродействием выдает команду на отсечку топлива в КС .
Информационный обмен с системами самолета. Информационный обмен осуществляется по последовательным и параллельным каналам информационного обмена.
Выдача информации в контрольно-проверочную и регулировочную аппаратуру. Для определения исправного состояния электронной части САУ, поиска неисправностей, эксплуатационной регулировки электронных агрегатов в комплекте принадлежностей двигателя имеется специальный пульт контроля, проверки и регулировки. Пульт применяется при наземных работах, в некоторых системах устанавливается на борту самолета. Между САУ и пультом осуществляется информационный обмен по кодовым линиям связи через специально подсоединяемый кабель.
Интегрированное управление двигателем в составе СУ самолета по командам из самолетной системы управления. С целью получения максимальной эффективности работы двигателя и самолета в целом интегрируют управление двигателем и другими системами СУ. Системы управления интегрируют на базе бортовых цифровых вычислительных систем, объединенных в систему управления бортовым комплексом. Интегрированное управление осуществляется корректировкой программ управления двигателем от системы управления СУ, выдачей параметров двигателя для управления воздухозаборником (ВЗ). По сигналу от САУ ВЗ выдаются команды на установление элементов механизации двигателя в положение повышения запасов ГДУ компрессора. Для предотвращения срывов в управляемом ВЗ при изменении режима полета режим двигателя соответственно корректируется или фиксируется.
Контроль исправности элементов САУ. В электронной части САУ двигателя автоматически контролируется исправность элементов САУ. При отказе элементов САУ информация о неисправностях выдается в систему контроля СУ самолета. Выполняется реконфигурация программ управления и структуры электронной части САУ для сохранения ее работоспособности.
Оперативный контроль и диагностирование состояния двигателя. САУ, интегрированная с системой контроля выполняет дополнительно следующие функции:
Прием сигналов от датчиков и сигнализаторов двигателя и самолета, их фильтрацию, обработку и выдачу в бортовые системы индикации, регистрации и другие системы самолета, преобразование аналоговых и дискретных параметров;
Допусковый контроль измеренных параметров;
Контроль параметра тяги двигателя на взлетном режиме;
Контроль работы механизации компрессора;
Контроль положения элементов реверсивного устройства на прямой и обратной тяге;
Расчет и хранение информации о наработке двигателя;
Контроль часового расхода и уровня масла при заправке;
Контроль времени запуска двигателя и выбега роторов КНД и КВД при останове;
Контроль систем отбора воздуха и системы охлаждения турбины;
Виброконтроль узлов двигателя;
Анализ тенденций изменения основных параметров двигателя на установившихся режимах.
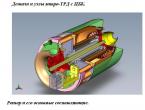
На рис. 2 схематично представлен состав агрегатов системы автоматического управления ТРДД.
При достигнутом в настоящее время уровне параметров рабочего процесса авиационных ГТД дальнейшее улучшение характеристик силовых установок связано с поиском новых путей управления, с интеграцией САУ АД в единую систему управления самолетом и двигателем и их совместным управлением в зависимости от режима и этапа полета. Такой подход становится возможным при переходе к электронным цифровым системам управления двигателем типа FADEC (Full Authority Digital Electronic Control), т.е. к системам, в которых электроника осуществляет управление двигателем на всех этапах и режимах полета (системам с полной ответственностью) .
Преимущества цифровой системы управления с полной ответственностью перед гидромеханической системой управления очевидны:
Система FADEC имеет два независимых канала управления, что значительно повышает ее надежность и исключает необходимость многократного резервирования, снижает ее вес;

Рис. 2.
Система FADEC осуществляет автоматический запуск, работу на установившихся режимах, ограничение температуры газа и скорости вращения, запуск после погасания камеры сгорания, антипомпажную защиту за счет кратковременного снижения подачи топлива, она функционирует на основе данных разного типа, поступающих от датчиков;
Система FADEC обладает большей гибкостью, т.к. количество и сущность выполняемых ею функций можно увеличивать и изменять с помощью введения новых или корректировки существующих программ управления;
Система FADEC значительно снижает рабочие нагрузки для экипажа и обеспечивает применение широко распространенной техники электропроводного (fly-by-wire) управления самолетом;
В функции системы FADEC входит мониторинг состояния двигателя, диагноз отказов и информация о техобслуживании всей силовой установки. Вибрация, рабочие характеристики, температура, поведение топливных и масляных систем - одни из многих эксплуатационных аспектов, мониторинг которых обеспечивает безопасность, эффективный контроль ресурса и снижение расходов на обслуживание;
Система FADEC обеспечивает регистрацию наработки двигателя и повреждаемости его основных узлов, наземный и походный самоконтроль с сохранением результатов в энергонезависимой памяти;
Для системы FADEC отсутствует необходимость регулировок и проверок двигателя после замены какого-либо из его узлов.
Система FADEC также:
Управляет тягой на двух режимах: ручном и автоматическом;
Контролирует расход топлива;
Обеспечивает оптимальные режимы работы, управляя течением воздуха по тракту двигателя и регулируя зазор за рабочими лопатками ТВД;
Контролирует температуру масла интегрированного привод-генератора;
Обеспечивает выполнение ограничений по работе системы реверса тяги на земле.
На рис. 3 наглядно продемонстрирован широкий спектр функций, выполняемых САУ FADEC.
В России САУ этого типа разрабатываются для модификаций двигателей АЛ-31Ф, ПС-90А и ряда других изделий.
Рис. 3. Назначение цифровой системы управление двигателем с полной ответственностью

Автоматическая система (АС) ГТД летательного аппарата включает управляемый объект - двигатель и автоматическое управляющее устройство.
Автоматическое управляющее устройство авиационного газотурбинного двигателя имеет фактически несколько самостоятельных автоматических систем. Автоматические системы, реализующие простые законы управления, называются также системами автоматического регулирования (САР).
На рисунке (для примера) представлена функциональная схема АС, включающей объект управления ГТД и САР.
В процессе автоматического управления двигатель испытывает управляющие и возмущающие (внешние и внутренние) воздействия . Регулирующие факторы (РФ) являются по отношению к двигателю управляющими воздействиями и служат входными сигналами, которые формируются определёнными контурами САР.
К внешним воздействиям относятся возмущения, обусловленные изменением окружающей среды, т.е. Р * в, Т * в и Р н.
К внутренним воздействиям относятся возмущения, обусловленные случайным изменением параметров проточной части двигателя, т.е. деформациями и боевыми повреждениями деталей двигателя, отказы и неисправности систем двигателя, в том числе и АС.
Изменение режима работы двигателя лётчиком осуществляется воздействием на РУД, а регулируемые (РП) и ограничиваемые (ОП) параметры , по отношению к объекту управления - двигателю, являются выходными сигналами системы. Как объект автоматического управления, двигатель характеризуется статическими и динамическими свойствами.
Статические свойства - проявляются на установившихся режимах работы и характеризуются зависимостью управляемых (регулируемых) параметров от управляющих факторов.
Динамические свойства - проявляются на переходных режимах, т.е. при изменении управляющих факторов и внешних возмущающих воздействий, и характеризуются собственной устойчивостью двигателя.
Собственная устойчивость двигателя - это способность двигателя после случайного отклонения от внешних или внутренних возмущающих воздеиствии самостоятельно возвращаться на исходный режим.
Выясним, устойчив ли ТРД с рассмотренной системой топливопитания. Для этого изобразим кривые потребной и располагаемой подач топлива в координатахG T , n. Кривая G т. потр (n) определяет подачутоплива, потребную для обеспечения установившихся режимов с различными η (статическая характеристика). Кривая G T РАСП (n) является Характеристикой плунжерного насоса при заданном φ ш.
Из рисунка видно, что в точках 1 и 2 режимы работы могут быть
На режиме, соответствующем точке 2:
При n до (n 2 +Δn) → G T РАСП < G т. потр → ↓n до n 2 .
При ↓n до (n 2 -Δn)→ G T РАСП > G т. потр → n до n 2 .
Таким образом, на этом режиме двигатель самостоятельно возвращается на исходный режим, т.е. устойчив .
На режиме, соответствующем точке 1:
При n до (n 1 +Δn) → G T РАСП > G т. потр n.
При ↓n до (n 1 -Δn)→ G T РАСП < G т. потр → ↓n
Т.е. на этом режиме двигатель неустойчив .
Области устойчивых и неустойчивых режимов разделены точкой касания кривых потребной и располагаемой подач топлива. Этой точке соответствует режим работы с так называемой граничной частотой вращения n гр.
Итак, при n > n гр - двигатель устойчив n< n гр - двигатель неустойчив
Поэтому для обеспечения устойчивой работы двигателя в диапазоне n < n гр необходима автоматическая система (регулятор), управляющая подачей топлива в двигатель.
К тому же с увеличением высоты полёта n гр возрастает, т.е. диапазон устойчивых режимов уменьшается, и на больших высотах весь диапазон рабочих режимов может оказаться в неустойчивой области.

Следовательно, необходимо автоматическое управление подачей топлива во всём диапазоне, от n мг до n МАХ, что невозможно без автоматических систем.
Автоматические системы предназначены для управления подачей топлива в двигатель с целью обеспечения заданного (выбранного) закона управления .
Следует также сказать о необходимости автоматизации приёмистости и сброса газа.
Приемистость двигателя - это процесс быстрого увеличения тяги за счёт повышения расхода топлива при резком перемещении РУД вперёд.
Различают полную и частичную приемистость:
Полная прмемистость - приемистость с режима МГ до режима «максимал».
Частичная приемистость - приемистость с любого крейсерского режима до большего крейсерского режима или максимального режима.
Сброс газа - процесс быстрого уменьшения тяги двигателя за счёт снижения расхода топлива при резком перемещении РУД назад.
Приемистость и сброс газа оцениваются соответственно временем приемистости и временем сброса газа, т.е. временем с начала перемещения РУД до достижения заданного режима повышенной или пониженной тяги двигателя.
Время приемистости определяется:
■ Моментами инерции роторов двигателя;
■ Величиной избыточной мощности турбины (ΔΝ=Ν τ -Ν κ);
■ Расходом воздуха;
■ Частотой вращения (n НД) исходного режима;
■ Диапазоном устойчивой работы камеры сгорания от α Μ IN до α Μ AX ;
■ Запасом устойчивости компрессора (ΔК У);
■ Величиной максимально допустимой температуры перед турбиной
Время сброса газа зависит от:
■ Моментов инерции роторов двигателя;
■ Расходов воздуха;
■ Частоты вращения исходного режима;
■ Диапазона устойчивой работы к.с.;
■ Запаса устойчивости компрессора.
Условия боевого применения самолётов требуют как можно меньшего времени приемистостиτ (τ приём) и сброса газа (τ СБ), в значительной степени определяющего их манёвренные качества. Это одно из важнейших требований, предъявляемых к двигателям самолётов военной авиации.
Перевод двигателя с пониженного режима на повышенный достигается избыточной (по сравнению с потребной) подачей топлива в к.с, обуславливающей появление на турбине избыточной мощности (ΔΝ). Очевидно, что чем больше ΔG Т.изб при прочих равных условиях, тем меньше τ приём.
Однако, увеличение избытков топлива с целью ↓τ приём ограничивается по причинам:
Из-за ↓ΔК У до 0 возникает неустойчивая работа компрессора;
При Т* Г > Т* Г max возможно повреждение элементов к.с. и турбины;
При ↓α < α Μ IN произойдёт богатый срыв и погасание к.с. (самовыключение двигателя).
На основании анализа характеристик двигателя устанавливаются предельные избытки топлива (ΔG ИЗБ т.пред =G т.пред -G т.потр), подаваемого в процессе приемистости, которые обеспечивают минимальное τ приём не сказываясь отрицательно на надёжности работы элементов двигателя, ΔG ИЗБ т.пред зависит от частоты вращения роторов и условий полёта самолёта (см. рис.).

Изучаемые АС n НД = const и G T = const не обеспечивают потребных подач топлива в процессе приемистости - переход насоса на повышенные G T оказывается слишком быстрым по сравнению со скоростью нарастания G B , которая определяется моментами инерции роторов двигателя. А управлять вручную темпом нарастания G T за счёт изменения скорости перемещения РУД практически невозможно.
Следовательно, в системе автоматического управления подачей топлива должны быть специальные автоматические устройства, которые управляли бы подачей топлива в процессе приемистости. Такие устройства называют автоматами приемистости.
При сбросе газа темп ↓G T также должен быть ограничен из условия недопустимости возникновения:
■ Неустойчивой работы компрессора;
■ Погасания к.с.
Поэтому обеспечение быстрого сброса газа (минимального τ СБ) при сохранении устойчивой работы двигателя требует введения дополнительной автоматизации управления подачей топлива -установки в систему автоматов сброса газа.
| | 3 | 1
В работе рассматривается система автоматического управления газотурбинным двигателем (САУ ГТД) для подвижного летательного объекта и проводится анализ её функционирования с учетом взаимного влияния динамики агрегата дозирования топлива и динамики двигателя. Приведены результаты моделирования работы САУ ГТД для идеальной системы и для системы с экспериментальными параметрами. Выявлена и обоснована идея разделения объекта управления на две части: агрегат дозирования топлива и двигатель. На основе исследования авторами предлагается использовать в структуре САУ ГТД математические модели разделенных частей системы, а также интеллектуальный подход к введению логического блока в структуру для повышения качества управления. Такой подход к проектированию САУ ГТД позволит учитывать динамику отдельно исполнительной части системы и самого двигателя, а также их взаимное влияние.
система автоматического управления
газотурбинный двигатель
подвижный летательный объект
исполнительный механизм
агрегат дозирования топлива
математическая модель
1. Научный вклад в создание авиационных двигателей. В двух книгах. Книга 1 Н34 / rолл. авторов; gод общ. ред. В.А. Скибина и В.И. Солонина. – М.: Машиностроение, 2000. – 725 с.: ил.
2. Нечеткое моделирование и управление / А. Пегат; пер. с англ. – М.: БИНОМ. Лаборатория знаний, 2009. – 798 с.: ил. – (Адаптивные и интеллектуальные системы).
3. Патент РФ № 2013152562/06, 26.11.2013 / Насибуллаева Э.Ш., Даринцев О.В., Денисова Е.В., Черникова М.А., RU 237665 C1 Устройство дозирования топлива в газотурбинный двигатель // Патент России № 2537665.2013. Бюл. № 1.
4. Проблемы проектирования и развития систем автоматического управления и контроля ГТД / С.Т. Кусимов, Б.Г. Ильясов, В.И. Васильев и др. – М.: Машиностроение, 1999. – 609 с.
5. Проектирование систем автоматического управления ГТД / под ред. Б.Н. Петрова. – М.: Машиностроение, 1981. – 400 с.
Известно, что преимущество современных подвижных летательных объектов в том, что большие скорости маневрирования затрудняют перехват аппарата в движении. Имеется также возможность использования различных сочетаний высот и скоростей полета: основную часть траектории аппарат летит на большой высоте при малом аэродинамическом сопротивлении, а перед целью выходит на малую высоту, с максимально возможной скоростью полета, что также затрудняет перехват. Существует возможность использования различных маневров на любом участке траектории.
Силовая установка (СУ) сложного летательного аппарата представляет собой короткоресурсный газотурбинный двигатель, а в некоторых случаях - прямоточный воздушно-реактивный двигатель.
К системе автоматического управления (САУ) объектами таких СУ предъявляются, как правило, следующие требования:
- высокая точность поддержания заданных параметров;
- минимальная сложность технического исполнения;
- возможность перехода с одного режима на другой (при совершении маневра) без снижения качества управления.
Для выполнения всех вышеперечисленных требований необходимо разработать новый подход к выбору структуры САУ, к синтезу алгоритмов управления и к их технической реализации. Данное утверждение основано на анализе результатов натурных испытаний и на проведенных ранее теоретических исследованиях.
Поясним на конкретном примере.
Рассмотрим простейшую САУ объектом управления подобного класса (рис. 1, а).

Рис. 1. а - простейшая САУ ГТД (X 0 - заданное значение параметра, X - отработанное значение параметра, ξ - ошибка системы, u - управляющий сигнал); б - предлагаемая структура САУ ГТД с разделенным объектом управления на АДТ и ГТД
Согласно концепции, разработанной ранее , исполнительный механизм (ИМ) и двигатель рассматривались как единое целое: неизменяемая часть системы.
Данный подход хорошо зарекомендовал себя при синтезе алгоритмов управления ГТД для гражданских летательных аппаратов или для транспортной авиации. Для таких объектов управления динамические процессы в топливной системе протекают гораздо быстрее, чем в двигателе, поэтому их влиянием на ГТД просто пренебрегали.
Иначе обстоит дело с короткоресурсными ГТД. В них переходные процессы в агрегате топливопитания и двигателе происходят практически одновременно. Данное утверждение неоднократно было подтверждено результатами натурных испытаний .
На основании вышесказанного выделим в отдельные звенья непосредственно ГТД и ИМ - агрегат дозирования топлива (АДТ) (рис. 1, б).
При проведении простейшего исследования работы САУ ГТД (рис. 1, б), заключающегося в различных сочетаниях параметров для передаточных функций для ГТД и АДТ, выяснено, что качество управления (точность, наличие перерегулирования, запасы устойчивости) резко изменяется при переходе с режима на режим. Таким образом, задачи анализа качества управления и синтеза алгоритмов управления объектами подобного класса становятся весьма актуальными.
Целью работы является проведение исследования САУ ГТД сложного летательного аппарата с учетом динамики параметров исполнительной части системы и двигателя.
Постановка задачи
Рассмотрим САУ ГТД, показанную на рис. 1, б. Система состоит из элемента сравнения (ЭС), регулятора, АДТ и ГТД. На вход ЭС поступает начальное значение количества оборотов n0 и полученное значение количества оборотов n, на выходе формируется рассогласование поступающих параметров и формируется ошибка системы - ξ. Ошибка поступает на вход регулятора, на выходе формируется управляющий сигнал u, который поступает на вход АДТ, на выходе формируется сигнал расхода топлива Gt, который поступает на вход ГТД и соответственно формируется сигнал n, поступающий на вход ЭС.
Передаточные функции АДТ и ГТД представляют собой инерционные звенья первого порядка, где постоянная времени T = 0,7 с, коэффициент усиления k = 1. Регулятор представляет собой изодромное звено, передаточная функция которого , при этом коэффициент усиления k = 1, постоянная времени T = 0,7 с.
Необходимо исследовать САУ ГТД и провести анализ качества управления с учетом динамики АДТ и ГТД.
Метод решения
Учитывая то, что в предложенной схеме САУ ГТД объект управления был разделен, целесообразно ввести нелинейные модели отдельно для АДТ и ГТД и моделировать работу системы, учитывая динамику работы ее элементов.
Для того, чтобы исследовать вышеописанную САУ ГТД, предлагается также ввести в структуру системы математические модели АДТ и ГТД, чтобы повысить качество управления всей системы в целом. На рис. 2 представлена схема такой САУ ГТД.

Рис. 2. Предлагаемая САУ ГТД, в которую входит регулятор, АДТ, ГТД, модель АДТ, модель ГТД и ЛБ
В логическом блоке (ЛБ) производится анализ входных сигналов следующим образом: на основе экспериментальных данных и экспертных заключений строится база знаний. Относительно неё формируются функции принадлежностей для входных параметров ЛБ, а также для выходных сигналов. Описание этих подходов достаточно хорошо известно . Сформировав необходимое изменение, ЛБ подает соответствующие сигналы на вход элемента сравнения, формируя сигнал управления, поступающий на вход АДТ и его модели. В ЛБ поступают два сигнала: рассогласование моделей АДТ и ГТД с моделями АДТ и ГТД - ошибка моделей (ξmodelei) и рассогласование АДТ с моделью АДТ - ошибка АДТ (ξ ADT). Как показывает практика, ошибка ГТД является небольшой и в ходе исследования не учитывается.
Результаты моделирования
Проведем исследование САУ ГТД в графической среде имитационного моделирования Simulink.
Для оценки качества управления САУ ГТД введем следующие требования:
Запас устойчивости по амплитуде: не менее 20 дБ;
Запас устойчивости по фазе: от 35 до 80°;
Перерегулирование: не более 5 %;
Статическая ошибка: не более ±5 % (±0,05);
Время регулирования: не более 5 с.
При моделировании системы (рис. 1, б) было выяснено, что только при значениях постоянной времени (T) для передаточных функций АДТ и ГТД T = 0,7 с, T = 0,5 с, T = 1 с и коэффициенте передачи k = 1 система работает оптимально, соответствуя требованиям качества управления и устойчивости системы. Это говорит о том, что система, изменяет параметры при работе на других режимах, качество управления которой может и не соответствовать требованиям.
Поэтому примем для САУ ГТД значение постоянной времени T = 0,7 с и коэффициента усиления k = 1 и будем считать систему идеальной, взятой за эталон в предстоящем исследовании.
Используя экспериментальные данные, полученные при различных прохождениях трасс, были выбраны точки, связанные с изменением высоты и скорости полета: за время 50, 200, 500 с.
Согласно известным формулам , используя экспериментальные данные в выбранных точках, были получены значения постоянной времени и коэффициента усиления для АДТ и ГТД. При моделировании в схеме САУ ГТД модели АДТ и ГТД менялись попеременно с полученными экспериментальными параметрами АДТ и ГТД, что дало возможность проанализировать систему согласно требованиям, описанными выше. В дальнейшем в работе будем использовать время моделирования 50 с, так как его будет достаточно для проведения исследования.



Рис. 3. Результаты моделирования САУ ГТД за время моделирования 50 с: a - переходный процесс САУ ГТД с экспериментальными данными (-), САУ ГТД с моделями АДТ и ГТД (- -); б - идеальная САУ ГТД; в - САУ ГТД с моделями
Результаты моделирования САУ ГТД за время 50 с представлены на рис. 3. Моделирование системы проводилось в три этапа: для идеальной схемы, с параметрами, используемыми при проектировании САУ ГТД, а также для системы с экспериментальными данными и системы, использующей вышеописанный подход с математическими моделями АДТ и ГТД для корректировки работы всей системы.
Как видно из рисунка, переходный процесс с идеальными параметрами передаточной функции для АДТ и ГТД устанавливается за время регулирования, которое составляет 5 с; система же с экспериментальными значениями достаточно инерционна и не соответствует требованиям качества управления и устойчивости, для корректировки САУ ГТД были введены математические модели АДТ и ГТД, которые уменьшили время регулирования и стали соответствовать требованиям.
Как видно из рис. 3, в, переходный процесс предложенной САУ ГТД уступает в качестве: значение не достигает единицы. Тем самым, для увеличения точности переходного процесса, предлагается ввести ЛБ на основе нечеткой логики, база знаний и функции принадлежностей которого для входных и выходных параметров будут соответствовать графику зависимости ошибок от управляющего сигнала (рис. 4).
Для обеспечения приемлемого характера переходного процесса предлагаемой САУ ГТД предлагается ввести еще один регулятор: интегрирующее звено. Экспериментальное моделирование показало, что для интегратора значение коэффициента усиления (k) равное 150 стало достаточным, чтобы увеличить качество выходных параметров. На рис. 5 представлен такой переходный процесс, а также на график нанесено несколько точек, характеризующих идеальный процесс.
Такое параметрическое и структурное изменение дало возможность качественно изменить выходные параметры системы с экспериментальными данными и приблизиться к выбранным в статье идеальным параметрам. Идея введения математических моделей АДТ и ГТД в контур управления отражена в патенте .

Рис. 4. Зависимость ошибок моделей и АДТ (ξ modelei , ξ ADT) от управляющего сигнала u с разделением на зоны: 1 - минимальная, 2 - средняя, 3 - максимальная

Рис. 5. Переходные процессы САУ ГТД с моделями и введением интегратора в структуру (—), идеальной ГТД (- -)
Результаты моделирования исследуемой САУ ГТД показывают правомерность предложенного подхода с целью повышения качества управления. Разделение объекта управления на АДТ и ГТД позволяет учитывать динамику исполнительной части системы и двигателя, появляется возможность использовать рассогласование между частями структурной схемы САУ ГТД, тем самым увеличивать надежность и устойчивость работы системы на различных режимах. Интеллектуальный подход позволил сформировать ЛБ, который качественно улучшил выходные параметры системы и позволил приблизиться к идеальным с достаточной степенью точности.
Библиографическая ссылка
Денисова Е.В., Черникова М.А. СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ВВЕДЕНИЕМ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ В КОНТУР УПРАВЛЕНИЯ // Фундаментальные исследования. – 2016. – № 9-2. – С. 243-248;URL: http://fundamental-research.ru/ru/article/view?id=40728 (дата обращения: 24.10.2019). Предлагаем вашему вниманию журналы, издающиеся в издательстве «Академия Естествознания»
Изобретение относится к области авиационного двигателестроения и может быть использовано для испытаний электронных систем (САУ) автоматического управления газотурбинными двигателями (ГТД) с блоком встроенного контроля (БВК). Сущность изобретения заключается в том, что испытывают БВК, имитируя по экспоненциальному закону распределения отказы элементов САУ, а по нормальному закону распределения - отказы программного обеспечения (ПО), затем определяют количество отказов, локализованных БВК, и по последнему и суммарному количеству отказов определяют коэффициент полноты проверки как отношение локализованных отказов к суммарному количеству отказов и характеристики надежности САУ в целом рассчитывают с учетом этого коэффициента. Технический результат изобретения - повышение эффективности и достоверности испытаний двухканальных электронных САУ ГТД с БВК. 1 ил.
Рисунки к патенту РФ 2351909
Изобретение относится к области авиационного двигателестроения и может быть использовано для испытаний электронных систем (САУ) автоматического управления газотурбинными двигателями (ГТД) с блоком встроенного контроля (БВК).
Известен способ испытания гидромеханической САУ с целью определения наработки на отказ системы. Способ заключается в том, что лидерный экземпляр САУ устанавливают на стенд-аналог ГТД, подключают к САУ имитаторы датчиков и исполнительных элементов ГТД, включают электропривод насоса САУ и проводят испытания САУ в течение времени, равного ресурсу САУ, с фиксацией возникающих в процессе испытаний отказов.
Недостатком известного способа является его неэкономичность: велики затраты на оплату электроэнергии, расходных материалов (керосин, вода, воздух), заработную плату обслуживающего персонала, низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ испытания электронной САУ ГТД , заключающийся в том, что экспериментально определяют интенсивности отказов элементов САУ и рассчитывают характеристики надежности САУ с учетом количества отказов САУ.
Недостатком этого способа является его низкая эффективность при определении показателей надежности резервированных (например, двухканальных) электронных САУ с развитым БВК, который обеспечивает реконфигурацию САУ при возникновении в ней отказов с постепенной деградацией качества управления ГТД.
Целью изобретения является повышение эффективности и достоверности испытаний.
Поставленная цель достигается тем, что в способе испытания двухканальной электронной системы автоматического управления (САУ) газотурбинным двигателем (ГТД) с блоком встроенного контроля (БВК), заключающемся в том, что экспериментально определяют интенсивности отказов элементов САУ и БВК и рассчитывают характеристики надежности САУ с учетом количества отказов САУ, дополнительно испытывают БВК, имитируя по экспоненциальному закону распределения отказы элементов САУ, а по нормальному закону распределения отказы программного обеспечения (ПО), затем определяют количество отказов, локализованных БВК, и по последнему и суммарному количеству отказов определяют коэффициент полноты проверки как отношение локализованных отказов к суммарному количеству отказов и характеристики надежности САУ в целом рассчитывают с учетом этого коэффициента.
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит задатчик 1 отказов, преобразователи 2 и 3 соответственно в электрический и гидравлический сигналы задатчика, основную электронную часть (ЭЧ) 4, исполнительную гидромеханическую часть (ГМЧ) 5 и БВК 6 САУ 7, компараторы 8 и 9 с оперативным запоминающим устройством (ОЗУ), счетчики 10, 11, 12, обрабатывающее устройство 13, а также модель двигателя (МД) 14, причем ЭЧ 4 через преобразователь 2, а ГМЧ 5 через преобразователь 3 подключены к задатчику 1, информационный вход компаратора 8 подключен к выходу ЭЧ 4, а управляющий вход - к входу преобразователя 2, информационный вход компаратора 9 подключен к выходу ГМЧ 5, а управляющий вход - к входу преобразователя 3, выходы компараторов 8 и 9 подключены к счетчику 11, выход БВК 6 подключен к счетчику 10, все счетчики 10, 11, 12 подключены к обрабатывающему устройству 13, выход ЭЧ 4 подключен к входу ГМЧ 5, а выход ГМЧ 5 - к входу МД 14, выход МД 14 подключен к входу ЭЧ 4 САУ 7.
Устройство работает следующим образом.
Задатчик 1, выполненный, например, в виде ПЭВМ, работающей по программе, обеспечивающей воспроизведение задатчиком 1 отказов элементов САУ 7 по экспоненциадьному, а ПО - по нормальному законам распределения, через преобразователи 2 и 3 подает имитации отказов на ЭЧ 4 и ГМЧ 5 САУ 7. При появлении сигнала отказа на выходе задатчика 1 в счетчик 12 заносится единица, на выходе преобразователя 2 или 3 появляется имитация отказа элемента или ПО в ЭЧ 4 или ГМЧ 5 САУ 7. По началу сигнала отказа в ОЗУ компаратора 8 (или 9) записывается функционал Фi выходного состояния ЭЧ 4 (Ф1) или ГМЧ 5 (Ф2) САУ 7.
ЭЧ 4 или ГМЧ 5 САУ 7 совместно с МД 14 как объектом управления реагируют на имитацию отказа. Если реакция САУ 7 на имитацию отказа приводит к изменению выходных параметров ГТД (МД 14), то функционал Ф1 (или Ф2) выходного состояния принимает новое значение Ф1" (или Ф2"). При этом на выходе компаратора 8 (или 9) появляется сигнал - признак отказа, приводящего к изменению выходных параметров ГТД (МД 14). Эти сигналы подсчитываются счетчиком 11.
Если имитация отказа обнаруживается, локализуется и парируется БВК 6, то на выходе БВК 6 появляется сигнал обнаруженного и «обезвреженного» отказа. Эти сигналы подсчитываются счетчиком 10.
По окончании цикла испытаний показания счетчиков 12 (суммарное количество имитированных отказов N), 11 (количество отказов, приводящих к изменению параметров ГТД N изм), 10 (количество отказов, локализованных БВК N лок) поступают в обрабатывающее устройство 13, где определяются:
Коэффициент полноты контроля Кпк

коэффициент полноты проверки Кпп

Затем рассчитывают характеристики надежности САУ в целом: определяют наработку на отказ, приводящий к выключению электронной части САУ (Тоэч) и наработку на незафиксированный отказ САУ, приводящий к произвольному изменению режима работы ГТД (Т.вд).
Для этого используются следующие зависимости:

где Кпп - коэффициент полноты проверки,
Кпк - коэффициент полноты контроля,
Квд - доля неконтролируемых отказов, приводящая к выключению двигателя,
Суммарная интенсивность отказов элементов одного канала электронной части САУ:

m - количество элементов в ГМЧ САУ.
Таким образом, обеспечивается плавный, без забросов перевод управления с ЭР 2 на ГМР 6, т.е. обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Литература
1. ГОСТ 2343-79 «Надежность изделий авиационной техники».
2. «Комплексные испытания цифровых САУ ГТД», т.о. ЦИАМ № 10607, 1986 г.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Способ испытания двухканальной электронной системы автоматического управления (САУ) газотурбинным двигателем (ГТД) с блоком встроенного контроля (БВК), заключающийся в том, что экспериментально определяют интенсивности отказов элементов САУ и БВК и рассчитывают характеристики надежности САУ с учетом количества отказов САУ, отличающийся тем, что дополнительно испытывают БВК, имитируя по экспоненциальному закону распределения отказы элементов САУ, а по нормальному закону распределения - отказы программного обеспечения (ПО), затем определяют количество отказов, локализованных БВК, и по последнему и суммарному количеству отказов определяют коэффициент полноты проверки как отношение локализованных отказов к суммарному количеству отказов и характеристики надежности САУ в целом рассчитывают с учетом этого коэффициента.