Привет студент. Приложение
Изобретение относится к вертолетостроению. Втулка несущего винта вертолета состоит из корпуса и узла подвески лопасти, включающего цапфу с подшипником, кожух с рычагом поворота лопасти, соединитель лопасти и эластомер. Цапфа узла подвески лопасти неподвижно соединена с корпусом втулки и снабжена самоориентирующимся двухрядным подшипником, внешняя обойма которого соединена с кожухом. Эластомер одним концом неподвижно соединен с цапфой, а другим концом с соединителем лопасти. Эластомер снабжен металлическими втулками и армирован высокопрочными нитями, соединяющими попарно металлические втулки, размещенные по каждую сторону от оси симметрии эластомера. Изобретение направлено на упрощение конструкции. 1 з.п. ф-лы, 2 ил.
Изобретение относится к вертолетостроению и служит для крепления лопастей и передачи им крутящего момента с вала редуктора, а также для восприятия и передачи на фюзеляж сил и моментов, создаваемых лопастями.
Известно, что классический узел подвески лопасти включает в себя: корпус втулки, горизонтальные, вертикальные и осевые шарниры, связанные при помощи соединителя с лопастями. Вертикальные шарниры снабжены демпферами (Фатеев С.С. «Основы конструкции вертолетов», Москва, Военное издательство, 1990, стр.57). Корпус втулки имеет шлицевое соединение с валом редуктора. Обычно с корпусом втулки соединяют горизонтальный шарнир, к нему вертикальный шарнир, а к нему осевой шарнир. Осевой шарнир по сути является узлом подвески лопасти и включает цапфу, на которой установлено несколько радиальных и упорных шарикоподшипников, распорные втулки и гайки для фиксации подшипников. Сверху узел подвески закрыт кожухом, снабженным рычагом поворота лопасти. Узел подвески также включает соединитель лопасти. Цапфа узла подвески подвижно установлена на оси вертикального шарнира. Приведенная втулка конструктивно близка к конструкции предлагаемого изобретения и может быть выбрана в качестве прототипа.
Недостатком приведенной втулки является множество сочлененных меж собой шарниров с целью придания лопастям необходимых степеней свободы, а также проведение периодического осмотра и смазки.
Известна также бесшарнирная втулка несущего винта с эластомерным подшипником или втулка типа «Старфлекс». Втулка содержит корпус, слоистый эластомер, шаровую опору, рукав втулки. Эластомерный подшипник выполняет функции всех трех шарниров и представляет собой набор чередующихся металлических и резиновых сферических прокладок. Они работают на сжатие от центробежной силы, на сдвиг при маховом движении и на кручение при изменении угла установки лопастей.
Недостатки эластомерных подшипников заключаются в низкой надежности сцепления металлических и резиновых прокладок. Такой подшипник может разрушиться под воздействием больших центробежных сил, создаваемых вращающимися лопастями, что требует включения в конструкцию дополнительно специальных скоб крепления лопастей.
Предлагаемое изобретение направлено на упрощение конструкции втулки несущего винта (НВ), увеличение ресурса работы и надежности.
Поставленная задача достигнута тем, что цапфа узла подвески соединена с корпусом втулки неподвижно, а на цапфе установлен самоориентирующийся двухрядный подшипник (ГОСТ 28428-90). Отличительная особенность такого подшипника в том, что его внешняя обойма может быть шарнирно повернута в любую сторону относительно геометрического центра подшипника, значит и относительно внутренней обоймы подшипника. Таким образом, шарнир такой конструкции является универсальным и совмещает в себе функции всех трех шарниров, обеспечивая достаточное количество степеней свободы, и может быть отклонен в любую сторону относительно оси цапфы. Эластомер представляет собой цельнотельный (литой, прессованный, вулканизированный и т.д) элемент. Эластомером или резиной называют любой упругий материал (полимер), обладающий в диапазоне эксплуатации высокоэластичными свойствами, который может растягиваться до размеров, во много раз превышающих его начальную длину, и возвращаться к исходному размеру, когда нагрузка снята. В данном случае эластомер предназначен для восприятия центробежных нагрузок на узел подвески, а также полностью разгружает от этих нагрузок внешнюю обойму самоориентирующегося подшипника. Кроме того, эластомер возвращает узел подвески в исходное положение после снятия нагрузки. В предложенной конструкции эластомер одним концом неподвижно соединен с цапфой, а другим концом с узлом соединения лопасти. Эластомер снабжен металлическими втулками, посредством которых осуществляется крепеж болтами, а материал эластомера армирован высокопрочными нитями (например, кордовыми или кевларовыми нитями), соединяющими попарно втулки, размещенные вдоль оси симметрии эластомера. Нити принимают на себя основную нагрузку, исключая возможность разрыва эластомера под воздействием центробежных сил. В то же время нити не препятствуют работе эластомера на сжатие от центробежной силы, на сдвиг при маховом движении и на кручение при изменении угла установки лопастей.
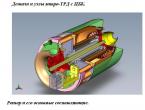
Один из возможных вариантов конструкции втулки представлен на чертежах. На фиг.1 приведен сборочный чертеж втулки, на фиг.2 приведено устройство эластомера.
Втулка несущего винта вертолета включает корпус втулки 1, к которому неподвижно соединена цапфа 2 узла подвески. На шейке цапфы установлен самоориентирующийся двухрядный подшипник 3. Гайка 4 фиксирует внутреннюю обойму подшипника. На внешней обойме подшипника установлен кожух 5, снабженный рычагом 6 поворота лопасти. К кожуху при помощи крепежа соединен фланец соединителя лопасти 7. Внутри цапфы соосно установлен эластомер 8. Эластомер снабжен металлическими втулками 9-12, размещенными по обе стороны от оси симметрии. Эластомер прикрепляется неподвижно к цапфе и узлу соединения лопасти при помощи болтового соединения 13. Эластомер армирован высокопрочными нитями (на чертеже не показаны). Нити попарно обведены вокруг металлических втулок (9-10, 11-12) и вулканизированы совместно с материалом эластомера.
Втулка работает следующим образом.
Корпус втулки 1 вращается вместе с узлом подвески лопасти. При помощи рычага общего шага приводится в действие тяга общего шага, соединенная с рычагом 6 поворота лопасти. При этом рычаги 6 поворота лопастей поворачивают вокруг своих осей одновременно все узлы подвески, устанавливая лопасти под одним и тем же углом. Так осуществляется управление общим шагом несущего винта.
Направление же силы тяги вертолета изменяется наклоном плоскости вращения НВ за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Осуществляется это при помощи ручки управления вертолетом. При этом связанные с ручкой управления тяги продольного и поперечного управления наклоняют тарелку автомата перекоса и тяги относительно оси вала НВ. Так как тяги связаны с рычагами 6 поворота лопастей, узлы подвески поднимаются и наклоняются, вращаясь на подшипнике 3, вызывая циклическое изменение углов установки лопастей относительно среднего значения шага. Циклическое изменение углов установки и соответствующее изменение силы тяги лопастей вызывает маховое движение лопастей, т.е наклон конуса вращения НВ. Возникающие при маховом движении лопастей центробежные силы и изгибающие моменты воспринимаются эластомерами 8. При снятии нагрузки эластомеры возвращают узлы подвески и связанные с ними через соединитель 7 лопасти в исходное состояние.
1. Втулка несущего винта вертолета, состоящая из корпуса и узла подвески лопасти, включающего цапфу с насаженным на нее подшипником, кожух с рычагом поворота лопасти, соединитель лопасти и эластомер, отличающаяся тем, что цапфа узла подвески лопасти неподвижно соединена с корпусом втулки и снабжена самоориентирующимся двухрядным подшипником, внешняя обойма которого соединена с кожухом.
2. Втулка несущего винта вертолета по п.1, отличающаяся тем, что эластомер одним концом неподвижно соединен с цапфой, а другим концом с соединителем лопасти, снабжен металлическими втулками и армирован высокопрочными нитями, соединяющими попарно металлические втулки, размещенные по каждую сторону от оси симметрии эластомера.
Втулки несущего винта (ВНВ) состоят из корпуса и рукавов подвески лопастей с шарнирами. Совершенство ВНВ во многом зависит от того, насколько удачно выбраны ее основные параметры. К числу таких параметров для шарнирных винтов прежде всего относятся:
Разнос горизонтальных и вертикальных шарниров;
Параметры, характеризующие кинематику НВ, т.е. определяющие характер изменения истинного угла установки лопасти от углов отклонения лопасти в плоскости взмаха, вращения Н, и коэффициента компенсатора взмаха к, ср ист= /((3 , £ , к) ;
Параметры, характеризующие нагруженность подшипниковых узлов втулки;
Параметры, определяющие демпфирующий момент относительно вертикального шарнира (Bill) Мg~ fg , £,).
Несущие винты вертолетов в зависимости от того, как в них осуществляется отклонение лопасти в плоскости взмаха, могут быть разделены на три основных типа:
С горизонтальными шарнирами (ГШ) (2.4.1, а-д);
С упругими элементами, выполняющими роль ГШ (2.4.1, е, ж);
Без ГШ или заменяющих их упругих элементов (2.4.1, з).
В последнем случае требуемая податливость достигается подбором соответствующих жесткостных характеристик комлевой части лопасти и осевого шарнира (ОШ) втулки.
Изменение угла установки лопасти чаще всего осуществляется за счет ее поворота в ОШ. В некоторых НВ второго типа ОШ отсутствует, а угол установки лопасти меняется за счет закручивания упругого элемента.
В практической деятельности вертолетных фирм используются кинематические схемы втулок с различным расположением шарниров относительно оси вращения НВ. Различным сочетанием шарниров достигается решение ряда конкретных задач динамики НВ и характера нагружения подшипников шарнирных узлов.
Увеличение разноса ГШ повышает эффективность управления и допускаемый диапазон центровок вертолета, но при этом растут изгибающие моменты на валу главного редуктора. Из опыта отечественного вертолетостроения следует, что целесообразно иметь минимальный разнос ГШ, а необходимые запасы управления получать за счет соответственного подбора диапазона отклонения автомата перекоса (АП). Такой подход позволяет создать наиболее компактную и легкую конструкцию втулки, Увеличение числа лопастей вызывает определенные трудности с размещением сочленений в одной плоскости, что заставляет увеличивать разнос ГШ. Главным фактором, определяющим минимально допустимый разнос ВШ втулок обычной схемы, является обеспечение восстанавливающего момента Мштт, создаваемого центробежными силами лопасти. Необходимо
учитывать, что Мвт зависит от угла взмаха лопасти р.
Обычно разнос ВШ можно подбирать из условия, что диапазон углов отклонения лопасти в плоскости вращения (авторотация - взлет) составляет 12-18°.
При правильном выборе кинематики в этом случае обеспечивается устойчивость лопасти относительно ВШ. Вынос ВШ при принятых максимальных углах отклонения лопасти в плоскости вращения так не может быть уменьшен и должен быть пропорциональным максимальному крутящему моменту. Переход на современные лопасти из КМ с ул= 6-7 вместо ул= 3,5-5, как на вертолетах предыдущих поколений, требует определенного увеличения выноса ВШ, необходимого для сохранения диапазона углов отклонения в плоскости вращения. Это, естественно, влечет за собой некоторое возрастание массы втулки НВ. Выносом ВШ достигается изменение частот колебания лопасти в плоскости вращения, что связано с отстройкой от «воздушного» и «земного» резонанса. Совмещение ГШ и ВШ в виде карданного узла обеспечивает равномерное нагружение подшипников ГШ на всех режимах полета вертолета (2.4.1, б).
При механическом приводе лопастей НВ через втулку передается крутящий момент М от двигателя. Втулка воспринимает аэродинамические Т и Q и инерционные силы Р и моменты, возникающие на лопастях НВ, и передает их на фюзеляж (2.4.2).
Масса рукава втулки пропорциональна центробежной силе лопасти и его длине. Следовательно, для снижения массы втулки целесообразно максимально уменьшить длину рукава. Этому препятствует ряд ограничений. Длину рукава нельзя сделать меньше суммарного размера максимально придвинутых к корпусу узлов шарниров. Кроме того, сокращение рукава, особенно для втулок многолопастных винтов, связано с трудностями компоновочного характера.
Существенно уменьшается длина рукава (при заданном I штт) на втулке с порядком следования шарниров «ГШ-ОШ-ВШ» (вертолет «Чинук», 2.4.1, в) и «ОШ-ГШ-ВШ» (вертолет «Флетиер», 2.4.1, г). Конструктивная компоновка втулки с совмещенными шарнирами приведена на 2.4.3 (вертолет S-58).
Основными показателями, характеризующими совершенство конструкции шарнирных втулок НВ, являются:
Несущая способность подшипников ГШ, ВШ и ОШ;
Уровень напряжений в деталях, подверженных действию переменных нагрузок;
Ресурс и возможность его дальнейшего увеличения;
Работоспособность демпферов;
Масса втулки;
Технологичность деталей и узлов;
Простота и удобство обслуживания.

от системы предупреждения появления трещин. Лопасти имеют большой ресурс, но весьма сложны в производстве.
Рисунок 16. Сечение многолонжеронной лопасти несущего винта.
1 – лонжероны, 2 – слои стеклоткани, 3 – сотовый заполнитель.
Композиционные лопасти. Композиционные лопасти, на сегодняшний день, являются самыми распространенными в мире. В России их применяют на вертолетах Ми-28, Ми-34, Ка-50 и др. Конструкции композиционных лопастей весьма многообразны. Сечения некоторых из них представлены на рисунке 17.
Достаточно простые лопасти подразумевают использование С–образного лонжерона и пористого (рисунок 17а) или сотового (рисунок 17б) заполнителя. Более сложные лопасти имеют многозамкнутый лонжерон и приклеенную хвостовой отсек. Пример сечения такого лонжерона показан на рисунке 17в, г, д. Промежуточные стенки, установленные в канале многозамкнутого лонжерона, увеличивают жесткость пустотелой лопасти. Такие лонжероны обладают высокой живучестью, так как при разрушении лонжерона в районе одной из полостей другие могут сохранять несущую способность. Хвостовой отсек лопасти, в настоящее время, чаще делается неразрезным, что значительно упрощает конструкцию.
В качестве материалов изготовления лонжеронов и лопастей используются угле, стекло, органопластики или их комбинации.

Рисунок 17. Сечение композиционных лопастей несущего винта.
а – вертолета ЕС145, б – ЕС332 МК2, в – Ка-50, г - ЕС225,
д - NH90.
1 – стеклопластиковый лонжерон, 2 – пористый заполнитель, 3 – углепластиковое покрытие, 4 – сотовый заполнитель.
2.6. Втулки несущих винтов
Втулка несущего винта вертолета осуществляет передачу крутящего момента от главного редуктора к лопастям несущего винта, при этом выполняя ряд других функций.
По способу крепления лопасти к валу, вращающему винт, несущие винты, можно подразделить на несколько типов.
Несущие винты с трехшарнирной подвеской лопастей (рисунок 18а) и втулкой с универсальным эластомерным подшипником (рисунок 18д) применяются на вертолетах разных

классов. Винт с общим горизонтальным шарниром (рисунок 18б) весьма распространен на сверхлегких и легких вертолетах. В некоторых случаях применяются винты на кардане (рисунок 18в) и с жестким креплением лопастей (рисунок 18г).
Втулки несущего винта с трехшарнирным креплением лопастей широко применялись в вертолетостроении. В настоящее время их использование сокращается, и на новых аппаратах они, практически, не встречаются. В России такие втулки использовались на вертолетах Ми-2, Ми-24, Ми-26 и др. Втулка имеет разнесенные горизонтальные (ГШ), вертикальные (ВШ) и осевые (ОШ) шарниры (рисунок 19). Подобное соединение лопасти дает ей возможность колебаться в нескольких плоскостях.
Рисунок 18. Типы несущих винтов.
а – с трехшарнирной подвеской лопастей; б – с общим горизонтальным шарниром; в – на кардане; г – с жестким креплением лопастей; д- с эластомерным подшипником.
1 – горизонтальный шарнир (ГШ), 2 – вертикальный шарнир (ВШ), 3 – осевой шарнир (ОШ), 4 – общий горизонтальный шарнир, 5 – кардан, 6 – эластомерный подшипник, 7- торсион.
Горизонтальные шарниры обеспечивают маховое движение (колебания в вертикальной плоскости) под действием пе-

ременных по азимуту аэродинамических сил. Вертикальные шарниры позволяют лопастям совершать колебания в плоскости вращения. Эти колебания происходят под действием переменных сил лобового сопротивления и сил Кориолиса. Колебания лопастей относительно вертикального шарнира гасятся гидравлическими демпферами. Обычно демпферы соединяют подвижную и неподвижную часть лопасти.
Благодаря шарнирному креплению лопастей с корпусом втулки, значительно снижаются переменные напряжения в элементах несущего винта.
Осевые шарниры втулки предназначены для изменения углов установки лопастей. Для уменьшения угла установки лопасти при взмахе вверх и увеличения угла установки при движении ее вниз подбирают угол σ1 , образованный осью ГШ и отрезком, соединяющим центр ГШ с концом поводка рычага поворота лопасти.
Рисунок 19. Схема втулки с разнесёнными ГШ.
1- ось вала, 2- ГШ, 3- ВШ, 4-ОШ, 5- гидродемпфер, 6- поводок лопасти.

В некоторых случаях демпферы соединяют между собой подвижные части разных лопастей (рисунок 20), что упрощает конструкцию и облегчает вес несущей системы.
Рисунок 20. Схема карусельной установки демпфера. 1-лопасть, 2-демпфер, 3-ВШ.
Втулки с эластомерными подшипниками являются са-
мыми распространенными. Одна из разновидностей универсальной эластомерной шарнирной втулки представлена на рисунке 21.
Рисунок 21. Схема эластомерного шарнира втулки несущего винта.
1 - слой металла, 2 - слой резины, 3 - металлический стержень, соединяющийся с лопастью.
Принцип действия эластомерного подшипника основан на использовании свойств резины: подвергаться значительным деформациям при растяжении, сжатии и кручении.
Эластомерные подшипники представляют собой съемные блоки, состоящие из слоев резины и металла. Они не требуют смазки, уменьшают количество деталей втулки несущего винта, упрощают эксплуатацию и снижают стоимость. В связи с тем, что резина в подшипнике подвергается термомеханическому воздействию, она быстро стареет. Вследствие этого эластомерные подшипники обычно подлежат замене каждые 4 года.
Втулки с общим ГШ применяются на двухлопастных винтах. Лопасти жестко соединяются между собой. Подвеска на шарнире позволяет исключить влияние асимметрии обтекания.
Центробежные силы лопастей замыкаются на корпусе втулки и не нагружают подшипники, образующие ось ГШ. Для разгрузки комля лопасти от изгибающего момента имеют небольшой конструктивный угол конусности а0 =2…6°. К достоинствам втулок с общим ГШ следует отнести: простоту конструкции втулки, малую массу. Недостатками таких винтов являются большие изгибающие моменты в комле лопасти и большой уровень вибрации на втулке двухлопастного винта, вызываемый второй гармоникой аэродинамических сил. Такая конструкция широко используется на легких и сверхлегких вертолетах для несущих и двухлопастных рулевых винтов.
Втулки на кардане также имеют жесткое крепление лопастей между собой. Втулка крепится к валу с помощью универсального шарнира (кардана). Горизонтальные шарниры заменены карданами. Центробежные силы лопастей замыкаются на корпусе втулки и не нагружают подшипники, образующие ось кардана. ОШ нагружены сильнее, чем у винтов с шарнирным креплением лопастей. Центр кардана для облегчения управления выносят наверх. Такая конструкция широко используется на втулках рулевых винтов.
Втулки с жестким креплением лопастей имеет простую конструкцию, однако в лопастях и валах создаются большие
изгибающие моменты, что приводит к утяжелению конструкции.
Существуют также втулки несущих винтов, рукава которых выполнены из упругих материалов, что позволяет лопастям совершать маховое движение в плоскостях тяги и вращение за счет упругости конструкционного материала. Это частично разгружает комлевую часть лопасти от изгибающих моментов.
2.7. Конструкция втулок несущих винтов
За последние годы конструкция втулок несущего винта претерпела существенные изменения в сторону упрощения.
Наиболее сложной является конструкция трехшарнирной втулки (рисунок 22). Ее корпус 1 обычно изготавливается из стали или титанового сплава. Он закреплен на валу главного редуктора посредством шлиц и центрируется верхним 2 и нижним 17 конусами. Верхнее конусное кольцо состоит из двух половин, а нижнее - разрезное. Сверху корпус закрепляется на валу гайкой. Середины проушин корпуса смещены от оси вращения несущего винта, что позволяет равномерно нагружать подшипники ГШ и ВШ. Проушины корпуса вместе со скобой 5 образуют корпус ГШ. На пальце ГШ 4 установлены внутренние кольца 3 игольчатых подшипников. Наружные кольца находятся в проушинах корпуса. Между кольцами установлены две шайбы, выполняющие роль упорных подшипников скольжения. Они воспринимают осевые усилия, возникающие при колебаниях лопасти относительно ВШ. Между шайбами и внутренними кольцами имеется упорное кольцо. В качестве уплотнения ГШ используются резиновые армированные манжеты. К проушине пальца ГШ крепится шток демпфера ВШ. Для ограничения колебаний лопасти относительно ГШ на втулке имеются упоры. Верхние ограничители необходимы для предотвращения полного закидывания лопастей вверх при сильном ветре. Нижний ограничитель может изменять свое положение в зависимости от частоты вращения. Это вызвано тем, что допустимый угол свеса лопасти при неработающем

Рисунок 22. Конструкция втулки несущего винта.
1 - корпус втулки, 2 - верхний конус, 3 – внутреннее кольцо игольчатых подшипников, 4 – палец ГШ, 5- скоба, 6 – противовес, 7- цапфа ОШ, 8, 11шариковый радиальный подшипник, 9 – двухрядный роликовый подшипник, 10 – корпус ОШ, 12 – пружина, 13, 15 – пальцы, 14 – тяга, 16– собачка, 17 – нижний конус, 18 – рычаг поворота лопасти, 19 – валик рычага поворота лопасти, 20 – подшипник.
винте гораздо меньше, чем потребный угол маха лопасти вниз в полете. Поэтому на скобе имеются постоянные упоры и центробежный ограничитель свеса. Осевой шарнир образован соединением цапфы 7 и корпуса 10 ОШ. К цапфе крепится кронштейн, расположенный на цилиндре гидродемпфера. На хвостовике цапфы установлены подшипники ОШ: два шариковых радиальных 8, 11, которые воспринимают усилия от изгибающих моментов, действующих на лопасть, и упорный двухрядный роликовый 9, воспринимающий центробежную
силу лопасти. Гнезда сепаратора роликового подшипника развернуты под углом 50" к радиальному направлению. При таком расположении гнезд сепаратор не только колеблется, но и непрерывно вращается в одном направлении. В связи с этим ролики постоянно мигрируют и дорожки колец подшипника полностью участвуют в работе. В результате увеличиваются срок службы подшипников и ресурс ОШ. Корпус ОШ выполнен в виде стакана с проушинами для крепления лопасти. Скоба и цапфа образуют корпус ВШ, который конструктивно выполнен аналогично ГШ. Рычаг поворота 18 лопасти крепится болтами к корпусу ОШ. В цилиндрической полости на конце рычага на двухрядном радиально-упорном шарикоподшипнике и радиальном роликовом подшипнике установлен валик 19. В проушине валика на двух шарикоподшипниках 20 установлен палец, соединяющий рычаг поворота лопасти с тягой автомата перекоса.
Центробежный ограничитель (рисунок 23) смонтирован на нижней поверхности вертикального ограничителя 1 с помощью кронштейна 4 и сухаря 2. На кронштейн 4 на двух шариковых подшипниках установлен подвижный кронштейн 5. К нему крепится центробежный упор свеса 9 и две пластины 6, к которым крепится груз 7, состоящий из набора стальных шайб. Пружина 8 одним концом закреплена на кронштейне 4, а другим - за болт крепления груза 7. На малых частотах вращения несущих винтов зуб центробежного упора свеса 9 под действием пружины 8 находится, в зазоре между упорами корпуса втулки 10 и вертикального ограничителя 1, уменьшая, таким образом, свес лопасти.
Контактная поверхность упора 9 плотно прилегает к соответствующим поверхностям на корпусе 10 и вертикальном ограничителе 1. Подшипники ограничителя свеса посажены в корпус кронштейна 4 на резиновых втулках амортизаторах, что разгружает их от больших нагрузок.
При увеличении частоты вращения несущего винта грузы 7 под действием центробежной силы начинают преодолевать сопротивление пружины 8 и выводить зуб упора свеса 9 из за-

зора между упорами на корпусе 10 и вертикальном ограничителе 1.
Рисунок 23. Центробежный ограничитель свеса.
1 - вертикальный ограничитель, 2 - сухарь, 3 - болт, 4 - кронштейн, 5 - подвижный кронштейн, 6 - стальные пластины, 7 - груз, 8- пружина, 9 - упор свеса, 10 - корпус втулки.
При уменьшении частоты вращения несущего винта уменьшается центробежная сила груза 7 и упор 9 под действием пружины 8 возвращается в исходное положение. Таким образом, на рабочих частотах вращения несущего винта упор свеса 9 не препятствует маховому движению лопасти.
В конструкции втулок часто удается узлы навески лопасти совместить с вертикальным шарниром (рисунок 24). В этом случае лопасти непосредственно соединяются с демпфером вертикального шарнира. Конструкция при этом упрощается. Если же соединение с демпфером делается легкоразъемным, то лопасти, поворачиваясь относительно ВШ, могут быть сложены вручную вдоль хвостовой балки.
В настоящее время часто применяются осевые шарниры с торсионом (рисунок 25). Обычно торсион представляет собой набор металлических пластин, которые выдерживают растяги-
Втулка несущего винта
Основной агрегат несущего винта; предназначается для крепления лопастей, передачи крутящего момента от вала главного редуктора к лопастям, а также для восприятия и передачи на фюзеляж аэродинамических сил, возникающих на лопастях несущего винта. Различают следующие типы В. н. в.: шарнирные, упругие и жёсткие.
В конструкции шарнирной втулки
крепление лопастей к корпусу втулки осуществляется посредством горизонтальных, вертикальных и осевых шарниров. Горизонтальные шарниры обеспечивают возможность махового движения лопастей. Вертикальные шарниры позволяют лопастям совершать колебания в плоскости вращения (эти колебания возникают под действием переменных сил лобового сопротивления и сил Кориолиса, появляющихся при колебаниях лопасти относительно горизонтального шарнира). Благодаря шарнирному сочленению лопастей с корпусом втулки значительно снижаются переменные напряжения в элементах несущего винта и уменьшаются передающиеся от винта на фюзеляж вертолёта моменты аэродинамических сил. Осевые шарниры В. н. в. предназначены для изменения углов установки лопастей. В целях уменьшения свеса (изгиба) лопастей и создания необходимых зазоров между лопастями и хвостовой балкой вертолёта при невращающемся несущем винте и при малой частоте вращения несущего винта в конструкцию В. н. в. введены центробежные ограничители свеса.
Во всех шарнирах, в которых используются подшипники качения, предусматриваются системы смазки и уплотнений. В осевых шарнирах в качестве элементов, воспринимающих центробежные силы лопастей, применяются пластинчатые и проволочные торсионы, изготовленные из высокопрочной нержавеющей стали. Имеются так называемые эластомерные В. н. в., в шарнирах которых применяются цилиндрические, конические или сферические эластомерные подшипники. Эти подшипники выполнены из слоев стали и привулканизированных к ним слоев эластомера. Отсутствие трущихся металлических деталей уменьшает износ узлов. Конструкция В. н. в. упрощается, устраняется необходимость применения торсионов, сокращается время на техническое обслуживание, увеличивается надёжность конструкции. В конструкциях шарнирных В. н. в. с целью предотвращения явления «земного резонанса» колебания лопастей относительно вертикальных шарниров гасятся с помощью демпферов. которые в зависимости от используемого рабочего элемента подразделяются на фрикционные, гидравлические, пружинно-гидравлические и эластомерные. Шарнирные В. н. в. в зависимости от схемы могут быть трёх типов: с разнесёнными горизонтальными шарнирами (оси горизонтальных шарниров находятся на некотором расстоянии от оси несущего винта), с совмещёнными горизонтальными шарнирами (оси горизонтальных шарниров пересекаются на оси несущего винта), с совмещёнными горизонтальными и вертикальными шарнирами (оси обоих шарниров пересекаются в одной точке, отнесённой на некоторое расстояние от оси несущего винта).
Упругая втулка
может быть выполнена с упругим элементом только в одном вертикальном или горизонтальном шарнире либо сразу в обоих шарнирах. Корпус упругой В. н. в. изготовляется, как правило, из композиционных материалов. За осевым шарниром, который может быть выполнен по схеме с подшипниками качения и торсионом или с эластомерными подшипниками, расположена внешняя упругая часть втулки, обеспечивающая маховые движения лопасти. На несущем винте с такой втулкой может быть значительно повышена эффективность управления по сравнению с шарнирной В. н. в., что способствует увеличению манёвренности вертолёта.
Жёсткая втулка
имеет прочный центр, корпус (обычно из титанового сплава), прикреплённый к жёсткому приводному валу, и осевые шарниры, к корпусам которых через гребёнки прикреплены лопасти из композиционных материалов. В несущем винте с такой втулкой лопасть совершает колебательные движение в плоскости тяги и вращения не путём поворота в шарнирах, а благодаря большим деформациям лопасти или её более тонкого комлевого участка. Эти деформации оказываются допустимым и вследствие высокой прочности композиционных материалов. Такой винт с жесткой втулкой может рассматриваться подобным винту с шарнирной втулкой, имеющей большой разнос горизонтальных шарниров (10-35% от радиуса винта). Вертолёт с жёсткой В. н. в. обладает хорошими характеристиками управляемости. Важным преимуществом жёсткой В. н. в. является её простота (отсутствие высоконагруженных подшипников в шарнирах, демпферов и центробежных ограничителей свеса лопастей), облегчающая и удешевляющая изготовление винта и обслуживание его в эксплуатации.
- - пустотелый цилиндр, служит для опоры вращающихся валов или устанавливается в колесах, холостых шкивах и в таких случаях вращается сама. Изготовляется из материала более мягкого, чем вал или ось. В. бывают...
Сельскохозяйственный словарь-справочник
- - Обитый войлоком или сукном деревянный щит, закрывавший окно изнутри по всей его площади...
Архитектурный словарь
- - отношение площади лопастей несущего винта в плане к сметаемой площади. Определяется приближённо по формуле = zb/R), где R - радиус винта, z - число лопастей, b - хорда лопасти на радиусе 0,7R...
Энциклопедия техники
- - площадь поверхности, описываемой лопастями несущего винта при их вращении. О. п. вычисляется как площадь круга с радиусом, равным радиусу несущего винта...
Энциклопедия техники
- - вид привода несущего винта вертолёта, при котором крутящий момент создается силой реакции газов, вытекающих из установленных на концах лопастей реактивных двигателей или реактивных сопел...
Энциклопедия техники
- - острый угол в плоскости симметрии вертолёта между осью вала несущего винта и перпендикуляром к строительной горизонтали аппарата...
Энциклопедия техники
- - цилиндрич. или конич. деталь машины с осевым отверстием, о к-рое входит сопрягаемая деталь...
Большой энциклопедический политехнический словарь
- - Bushing - .Направляющая деталь или вкладыш подшипника...
Словарь металлургических терминов
- - центральная часть всякого колеса с цилиндрическим отверстием, предназначенная для насаживания колеса на ось или вал. ...
Морской словарь
- - сменяемая деталь механизма, через к-рую проходят вал, стержень или поршень, имеющие вращательное или прямолинейное поступательно-возвратное движение, вследствие чего изнашивается В., а не крупная деталь...
Технический железнодорожный словарь
- - ".....
Официальная терминология
- - имеет несколько различных значений, из которых главное представляет трубку, помещаемую внутри вращающегося предмета для предохранения от истирания...
Энциклопедический словарь Брокгауза и Евфрона
- - деталь машины, механизма, прибора цилиндрической или конической формы, имеющая осевое отверстие, в которое входит другая деталь...
Большая Советская энциклопедия
- - деталь машины или устройства в виде полого цилиндра, в отверстие которого входит сопрягаемая деталь. Втулки бывают сплошные и разрезные...
Большой энциклопедический словарь
- - Искон. Суф. производное от втулить «заткнуть», преф. образования от тулить «закрывать» . См. притулиться...
Этимологический словарь русского языка
- - ВТУ́ЛКА, -и, жен. 1. Цилиндрическая или конической формы деталь машины с продольным отверстием для вставляемой другой детали. 2. Затычка, пробка...
Толковый словарь Ожегова
"Втулка несущего винта" в книгах
Все от винта!
Из книги Как по лезвию автора Башлачев Александр НиколаевичВсе от винта! Рука на плече. Печать на крыле. В казарме проблем - банный день. Промокла тетрадь. Я знаю, зачем иду по земле, Мне будет легко улетать. Без трех минут - бал восковых фигур. Без четверти - смерть. С семи драных шкур - шерсти клок. Как хочется жить. Не меньше, чем
От винта!
Из книги От винта! автора Маркуша Анатолий МарковичОт винта!
Теория воздушного винта
Из книги Жуковский автора Арлазоров Михаил СауловичТеория воздушного винта Когда погас фейерверк юбилея, снова возвратились будни. Как и прежде, Жуковский ездит на занятия, читает лекции в Техническом училище и университете, отдает много сил своему любимому детищу - воздухоплавательному кружку.Еще не получив диплома об
Система узловых аэропортов («втулка и спицы»)
Из книги Продажа товаров и услуг по методу бережливого производства автора Вумек ДжеймсСистема узловых аэропортов («втулка и спицы») Большинство из нас вынуждено пользоваться услугами традиционных авиакомпаний, использующих систему узловых аэропортов: American, United, Northwest, Delta, Continental, US Airways в США и British Airways – в Европе.Идея, лежащая в основе системы узловых
От винта
Из книги Знаковые бренды автора Соловьев АлександрОт винта В 1916 году в северном пригороде Мюнхена Обервизенфельде объединились две небольшие фирмы, выпускавшие авиамоторы. Событие могло остаться незамеченным, если бы одну из этих фирм не возглавлял сын знаменитого конструктора Николауса Августа Отто, которому
История Прометея - ещё один путь мужчины, несущего свет
Из книги Дорога Домой автораИстория Прометея - ещё один путь мужчины, несущего свет Вместе все двенадцать подвигов Геракла - это двенадцать ступеней, которые должен пройти человек, когда становится на путь служения. Это двенадцать Сил, которыми должен овладеть каждый герой, ЧТОБЫ СТАТЬ БОГОМ и
Высверливание винта рычага
Из книги Руководство слесаря по замкам автора Филипс БиллВысверливание винта рычага Когда вы не в состоянии переместить кулачок привода, например когда есть сломанные или потерянные детали, может потребоваться высверлить винт рычага. Высверлив винт рычага, можно щупом попытаться переместить засов в открытое
Втулка
Из книги Большая энциклопедия техники автора Коллектив авторовВтулка Втулка – цилиндрической (преимущественно) формы изделие, выполненное из различных марок стали, чугуна, сплавов и пластмасс высокой прочности; широко применяется в различных механизмах и приборах. Например, в приборе Роквелла устанавливается специальная
Втулка
Из книги Большая Советская Энциклопедия (ВТ) автора БСЭ2. Срыв или износ резьбы винта щеки или винта средника.
Из книги Руководство по ремонту револьвера Наган 1895 автора Автор неизвестен2. Срыв или износ резьбы винта щеки или винта средника. (I) Заменить
Конец эры винта
Из книги Me 262 последняя надежда Люфтваффе Часть 1 автора Иванов С. В.Конец эры винта Когда в 1939 г. вспыхнула II мировая война, самолет уже был весьма важным фактором в бою. Со времен братьев Райт авиастроение прошло большой путь. Постепенно усовершенствовалась конструкция, появились новые технические решения, разработана оптимальная
Совершенствование воздушного винта
Из книги Британские асы пилоты «Спитфайров» Часть 1 автора Иванов С. В.Совершенствование воздушного винта Первые «Спитфайры» имели двухлопастные деревянные воздушные винты; начиная с 78-го самолета на истребители стали ставить металлические трехлопастные винты фирмы де Хэвиленд, которые имели два положения установки шага лопастей.
Без винта
Из книги Продать и предать [Новейшая история российской армии] автора Воронов ВладимирБез винта Новейший ударный вертолет обещали армии пару десятилетий - то «Черную акулу» Ка-50, то «Ночной охотник» Ми-28Н, то «Аллигатор» Ка-52, а то и сразу все вместе. «Скоро… испытания завершены… не имеющий аналогов…» - твердили сменяющие друг друга главкомы ВВС,
История Прометея – ещё один путь мужчины, несущего свет
Из книги Древняя мудрость Руси. Сказки. Летописи. Былины автора Жикаренцев Владимир ВасильевичИстория Прометея – ещё один путь мужчины, несущего свет Геракл освободил Прометея, после того как совершил десять подвигов и стал Силой Жертвы.Прометей – про-мета. Мета - так называется цель, которая ставится всем существом и сердцем (см. ), а про - это приставка.
Устройство несущего основания
Из книги автораУстройство несущего основания Небольшие размеры плиток мягкой черепицы обеспечивают легкий и практически безотходный монтаж. Легкость черепицы не требует усиленной конструкции стропильной системы, что позволяет не усиливать несущую конструкцию даже тогда, когда речь
Общие положения.
Несущий винт вертолета (НВ) предназначен для создания подъемной силы, движущей (пропульсивной) силы и управляющих моментов.
Несущий винт состоит из втулки, лопастей, которые крепятся к втулке с помощью шарниров или упругих элементов.
Лопасти несущего винта, благодаря наличию на втулке трех шарниров (горизонтального, вертикального и осевого), совершают в полете сложное движение: - вращаются вокруг оси НВ, перемещаются вместе с вертолетом в пространстве, изменяют свое угловое положение, поворачиваясь в указанных шарнирах, поэтому аэродинамика лопасти несущего винта сложнее аэродинамики крыла самолета.
Характер обтекания НВ зависит от режимов полета.
Основные геометрические параметры несущего винта (НВ).
Основными параметрами НВ являются диаметр, ометаемая площадь, число лопастей, коэффициент заполнения, разнос горизонтального и вертикального шарниров, удельная нагрузка на ометаемую площадь.
Диаметр D – диаметр окружности по которой движутся концы лопастей при работе НВ на месте. У современных вертолетов диаметр составляет 14-35 м.
Ометаемая площадь Fом – площадь круга, который описывают концы лопастей НВ при его работе на месте.
Коэффициент заполнения σ.равен:
σ = (Z л F л) / F ом (12.1);
где Z л – количество лопастей;
F л – площадь лопасти;
F ом – ометаемая площадь НВ.
Характеризует степень заполнения лопастями ометаемой площади, изменяется в пределах s=0,04¸0,12.
При увеличении коэффициента заполнения тяга НВ растет до определенного значения, в связи с увеличением реальной площади несущих поверхностей, затем падает. Падение тяги происходит из-за влияния скоса потока и вихревого следа от идущей впереди лопасти. При увеличении s, необходимо увеличить и мощность, подводимую к НВ из-за увеличения лобового сопротивления лопастей. При увеличении s уменьшается шаг, необходимый для получения заданной тяги, что отдаляет НВ от срывных режимов. Характеристика срывных режимов и причины их возникновения будут рассмотрены далее.
Разнос горизонтального l г и вертикального l в шарниров – расстояние от оси шарнира до оси вращения НВ. Может рассматриваться в относительных величинах (12.2.)
Находится в пределах . Наличие разноса шарниров улучшает эффективность продольно-поперечного управления.
определяется как отношение веса вертолета к площади ометаемого НВ. (12.3.)
(12.3.)
Основные кинематические параметры НВ.
К основным кинематическим параметрам НВ относятся частота или угловая скорость вращения, угол атаки НВ, углы общего или циклического шага.
Частота вращения n с - число оборотов НВ в секунду; угловая скорость вращения НВ -  определяет его окружную скорость w R .
определяет его окружную скорость w R .
Величина w R на современных вертолетах равна 180¸220 м/сек.
Угол атаки НВ (А) измеряется между вектором скорости набегающего потока и с  Рис. 12.1 Углы атаки несущего винта и режимы его работы.
Рис. 12.1 Углы атаки несущего винта и режимы его работы.
плоскостью вращения НВ (рис.12.1). Угол А считается положительным, если воздушный поток набегает на НВ с низу. На режимах горизонтального полёта и набора высоты А -отрицательный, на снижении А- положительный.. Различают два режима работы НВ – режим осевого обтекания, когда А=±90 0 (висение, вертикальный набор или снижение) и режим косой обдувки, когда А¹±90 0 .
Угол общего шага – угол установки всех лопастей НВ в сечении на радиусе 0,7R.
Угол циклического шага НВ зависит от режима работы НВ, подробно этот вопрос рассматривается при анализе косой обдувки НВ.
Основные параметры лопасти НВ.
К основным геометрическим параметрам лопасти относятся радиус, хорда, угол установки, форма профиля сечений, геометрическая крутка и форма лопасти в плане.
Текущий радиус сечения лопасти r определяет его расстояние от оси вращения НВ. Относительный радиус определяется
 (12.4);
(12.4);
Хорда профиля – прямая соединяющая наиболее удаленные точки профиля сечения, обозначается b (рис. 12.2).

Рис. 12.2. Параметры профиля лопасти. Угол установки лопасти j - угол между хордой сечения лопасти и плоскостью вращения НВ.
Угол установки j на `r=0,7 при нейтральном положении органов управления и отсутствии махового движения считается углом установки всей лопасти и общим шагом НВ.
Профиль сечения лопасти представляет собой форму сечения плоскостью, перпендикулярной к продольной оси лопасти, характеризуется максимальной толщиной с max , относительной толщиной  вогнутостью f и кривизной
вогнутостью f и кривизной  . На несущих винтах применяют, как правило, двояковыпуклые, несимметричные профили с небольшой кривизной.
. На несущих винтах применяют, как правило, двояковыпуклые, несимметричные профили с небольшой кривизной.
Геометрическая крутка производится уменьшением углов установки сечений от комля до конца лопасти и служит для улучшения аэродинамических характеристик лопасти.. Лопасти вертолетов имеют прямоугольную форму в плане, которая в аэродинамическом смысле не оптимальна, но проще с точки зрения технологии.
Кинематические параметры лопасти определяются углами азимутального положения, взмаха, качания и углом атаки.
Угол азимутального положения y определяется по направлению вращения НВ между продольной осью лопасти в данный момент времени и продольной осью нулевого положения лопасти. Линия нулевого положения в горизонтальном полете практически совпадает с продольной осью хвостовой балки вертолета.
Угол взмаха b определяет угловое перемещение лопасти в горизонтальном шарнире относительно плоскости вращения. Считается положительным при отклонении лопасти вверх.
Угол качания x характеризует угловое перемещение лопасти в вертикальном шарнире в плоскости вращения (рис.12.). Считается положительным при отклонении лопасти против направления вращения.
Угол атаки элемента лопасти a определяется углом между хордой элемента и набегающим потоком.
Лобовое сопротивление лопасти.
Лобовым сопротивлением лопасти называется аэродинамическая сила, действующая в плоскости вращения втулки и направленная против вращения НВ.
Лобовое сопротивление лопасти состоит из профильного, индуктивного и волнового сопротивлений.
Профильное сопротивление, вызывается двумя причинами: разностью давления перед лопастью и за ней (сопротивление давления) и трением частиц в пограничном слое (сопротивление трения).
Сопротивление давления зависит от формы профиля лопасти т.е. от относительной толщины () и относительной кривизны () профиля. Чем больше и тем больше сопротивление. Сопротивление давления не зависит от угла атаки на эксплуатационных режимах, но возрастает на критических a.
Сопротивление трения зависит от частоты вращения НВ и состояния поверхности лопастей. Индуктивное сопротивление – это сопротивление, вызванное наклоном истинной подъемной силы вследствие скоса потока. Индуктивное сопротивление лопасти зависит от угла атаки α и возрастает с его увеличением. Волновое сопротивление возникает на наступающей лопасти при превышении скорости полёта выше расчетной и появлении на лопасти скачков уплотнения.
Лобовое сопротивление, как и сила тяги, зависит от плотности воздуха.
Импульсная теория создания тяги несущего винта.
Физическая сущность импульсной теории заключается в следующем. Работающий идеальный винт отбрасывает воздух, предавая его частицам определенную скорость. Перед винтом образуется зона подсасывания, за винтом – зона отбрасывания и устанавливается воздушный поток через винт. Основные параметры этого воздушного потока: индуктивная скорость и прирост давления воздуха в плоскости вращения винта.
На режиме осевого обтекания воздух подходит к НВ со всех сторон, а за винтом образуется сужающая воздушная струя. На рис. 12.4. изображена достаточно большая сфера с центром на втулке НВ с тремя характерными сечениями: сечение 0, расположенное далеко перед винтом, в плоскости вращения винта сечение 1 со скоростью потока V 1 (скорость подсасывания) и сечение 2 со скоростью потока V 2 (скорость отбрасывания).
Поток воздуха отбрасывается НВ с силой Т, но и воздух давит на винт с этой же силой. Эта сила и будет силой тяги несущего винта. Сила равна произведению массы тела на  Рис. 12.3. К объяснению импульсной теории создания тяги.
Рис. 12.3. К объяснению импульсной теории создания тяги.
ускорение, которое тело получило под действием этой силы. Следовательно, тяга НВ будет равна
 (12.5.)
(12.5.)
где m s – секундная масса воздуха, проходящая через площадь НВ равная
 (12.6.)
(12.6.)
где - плотность воздуха;
F - площадь, отметаемая винтом;
V 1 - индуктивная скорость потока (скорость подсасывания);
а – ускорение в потоке.
Формулу (12.5.) можно представить в другом виде
 (12.7.)
(12.7.)
так как по теории идеального винта скорость отбрасывания воздуха V винтом в два раза больше скорости подсасывания V 1 в плоскости вращения НВ.
 (12.8.)
(12.8.)
Практически удвоение индуктивной скорости происходит на расстоянии равном радиусу НВ. Скорость подсасывания V 1 у вертолетов Ми-8 равна 12м/с, у Ми-2 – 10м/с.
Вывод: Сила тяги несущего винта пропорциональна плотности воздуха, ометаемой площади НВ и индуктивной скорости (частоте вращения НВ).
Перепад давления в сечении 1-2 по отношению к атмосферному давлению в невозмущенной воздушной среде равен трем скоростным напорам индуктивной скорости
 (12.9.)
(12.9.)
что вызывает увеличение сопротивления элементов конструкции вертолета, находящимися за НВ.
Теория элемента лопасти.
Сущность теории элемента лопасти заключается в следующем. Рассматривается обтекание каждого малого участка элемента лопасти, и определяются элементарные аэродинамические силы dу э и dх э действующие на лопасть. Подъемная сила лопасти У л и сопротивление лопасти Х л определяются в результате сложения таких элементарных сил, действующих по всей длине лопасти от ее комлевого сечения (r к) до концевого (R):
Аэродинамические силы действующие на несущий винт определяются как сумма сил действующих на все лопасти.
Для определения тяги несущего винта пользуются формулой аналогичной формуле подъемной силы крыла.
 (12.10.)
(12.10.)
Согласно теории элемента лопасти, сила тяги развиваемая несущим винтом, пропорциональна коэффициенту тяги, ометаемой площади НВ, плотности воздуха и квадрату окружной скорости конца лопастей.
Выводы сделанные по импульсной теории и по теории элемента лопасти взаимно дополняют друг друга.
На основании этих выводов следует, что сила тяги НВ в режиме осевого обтекания зависит от плотности воздуха (температуры), установочного угла лопастей (шага НВ) и частоты вращения несущего винта.
Режимы работы НВ.
Режим работы несущего винта определяется положением НВ в потоке воздуха.(рис.12.1) В зависимости от этого определяют два основных режима работы: режим осевого и косого обтекания. Режим осевого обтекания характеризуется тем, что набегающий невозмущённый поток двигается параллельно оси втулки НВ (перпендикулярно плоскости вращения втулки НВ). В этом режиме несущий винт работает на вертикальных режимах полёта: висение, вертикальный набор высоты и снижение вертолёта. Основной особенностью этого режима является то, что положение лопасти относительно потока, набегающего на винт, не меняется, следовательно, не меняются аэродинамические силы при движении лопасти по азимуту. Режим косого обтекания характеризуется тем, что воздушный поток набегает на НВ под углом к его оси (рис12.4.). Воздух подходит к винту со скоростью V и отклоняется вниз за счет индуктивной скорости подсасывания Vi. Результирующая скорость потока через НВ будет равна векторной сумме скоростей невозмущенного потока и индуктивной скорости
V1 = V + Vi (12.11.)
В результате этого увеличивается секундный расход воздуха протекающий через НВ, а следовательно, и тяга несущего винта, которая увеличивается с ростом скорости полета. Практически рост тяги НВ наблюдается при скорости свыше 40 км/ч.

Рис. 12.4. Работа несущего винта на режиме косой обдувки.
Косая обдувка. Эффективная скорость обтекания элемента лопасти в плоскости вращения НВ и ее изменение по ометаемой поверхности НВ.
На режиме осевого обтекания каждый элемент лопасти находится в потоке, скорость которого равна окружной скорости элемента  , где радиус данного элемента лопасти (Рис.12.6).
, где радиус данного элемента лопасти (Рис.12.6).
На режиме косого обтекания при угле атаки НВ не равном нулю (А=0) результирующая скорость W, с которой поток обтекает элемент лопасти, зависит от окружной скорости элемента u, скорости полета V1 и угла азимута .
W = u +V1 sinψ (12.12.)
т.е. при неизменной скорости полета и постоянной частоте вращения НВ (ωr = const.) эффективная скорость обтекания лопасти будет меняться в зависимости от угла азимута.
 Рис.12.5. Изменение скорости обтекания лопасти в плоскости вращения ВВ.
Рис.12.5. Изменение скорости обтекания лопасти в плоскости вращения ВВ.
Изменение эффективной скорости обтекания по ометаемой поверхности НВ.
На рис. 12.6. показаны векторы скоростей потока, который набегает на элемент лопасти в результате сложения окружной скорости и скорости полета. На схеме видно, что эффективная скорость обтекания изменяется как вдоль лопасти, так и по азимуту. Окружная скорость растёт от нуля у оси втулки винта до максимальной на концах лопастей. В азимуте 90 о скорость элементов лопасти равна  , на азимуте 270 о результирующая скорость равна
, на азимуте 270 о результирующая скорость равна  , у комля лопасти в зоне с диаметром d поток набегает со стороны ребра обтекания, т.е. образуется зона обратного обтекания, зона, которая не участвует в создании тяги.
, у комля лопасти в зоне с диаметром d поток набегает со стороны ребра обтекания, т.е. образуется зона обратного обтекания, зона, которая не участвует в создании тяги.
Диаметр зоны обратного обтекания тем больше, чем больше радиус НВ и чем больше скорость полета при неизменной частоте вращения НВ.
На азимутах y=0 и y=180 0 результирующая скорость элементов лопасти равна .

Рис.12.6. Изменение эффективной скорости обтекания по ометаемой поверхности ВВ.
Косая обдувка. Аэродинамические силы элемента лопасти.
При нахождении элемента лопасти в потоке возникает полная аэродинамическая сила элемента лопасти , которая может быть разложена в скоростной системе координат на подъемную силу и силу лобового сопротивления .
Величина элементарной аэродинамической силы определяется по формуле:
Rr = CR(ρW²r/2)Sr (12.13.)
Просуммировав элементарные силы тяги и силы сопротивления вращению, можно определить величину силы тяги и сопротивления вращению всей лопасти.
Точка приложения аэродинамических сил лопасти является центром давления, который находится на пересечении полной аэродинамической силы с хордой лопасти.
Величина аэродинамической силы определяется углом атаки элемента лопасти , который представляет собой угол между хордой элемента лопасти и набегающим потоком (Рис.12.7).
Угол установки элемента лопасти φ есть угол между конструктивной плоскостью несущего винта (КПВ) и хордой элемента лопасти.
Угол притекания есть угол между скоростями и .(Рис.12.7.)

Рис.12.7.Аэродинамические силы элемента лопасти при косой обдувке.
Возникновение опрокидывающего момента при жестком креплении лопастей. Силы тяги создаются всеми элементами лопасти, но наибольшие элементарные силы Т л будут у элементов, расположенных на ¾ радиуса лопасти, величина равнодействующей Т л на режиме косого обтекания тяги лопасти зависит от азимута. На ψ = 90 она максимальна, на ψ = 270 минимальна. Такое распределение элементарных сил тяги и расположение равнодействующей силы приводит к образованию большого переменного изгибающего момента у корня лопасти M изг.
Этот момент создает большую нагрузку в месте крепления лопасти, что может привести к её разрушению. В результате неравенства тяг Т л1 и Т л2 возникает опрокидывающий момент вертолета,
М х =Т л1 r 1 -T л2 r 2, (12.14.)
который возрастает с увеличением скорости полета вертолета.
Винт с жестким креплением лопастей имеет следующие недостатки (Рис 12.8):
Наличие опрокидывающего момента на режиме косого обтекания;
Наличие большого изгибающего момента в месте крепления лопасти;
Изменение момента тяги лопасти по азимуту.
Эти недостатки устраняются путем крепления лопасти к втулке с помощью горизонтальных шарниров.

Рис.12.8 Возникновение опрокидывающего момента при жестком креплении лопастей.
Выравнивание момента силы тяги в различных азимутальных положениях лопасти.
При наличии горизонтального шарнира тяга лопасти образует относительно этого шарнира момент, который поворачивает лопасть (рис.12. 9). Момент тяги Т л1 (Т л2) вызывает поворот лопасти относительного этого шарнира
 или
или  (12.15.)
(12.15.)
поэтому момент не передается на втулку, т.е. устраняется опрокидывающий момент вертолета. Изгибающий момент Muзг. у корня лопасти становится равным нулю, разгружается ее корневая часть, уменьшается изгиб лопасти, за счет этого уменьшаются усталостные напряжения. Вибрации, вызванные изменением тяги по азимуту, уменьшаются. Таким образом, горизонтальный шарнир (ГШ) выполняет следующие функции:
Устраняет опрокидывающий момент на режиме косой обдувки;
Разгружает корневую часть лопасти от M изг;
Упрощают управление несущим винтом;
Улучшают статическую устойчивость вертолета;
Уменьшают величину изменения тяги лопасти по азимуту.
Уменьшает усталостные напряжения в лопасти, и уменьшают ее вибрацию, из-за изменения силы тяги по азимуту;
Изменение углов атаки элемента лопасти за счет взмаха.
При движении лопасти в режиме косой обдувки в азимуте ψ от 0 до 90 о скорость обтекания лопасти постоянно увеличивается за счет составляющей скорости горизонтального полета (при малых углах атаки НВ  ) (рис.12. 10.)
) (рис.12. 10.)
 т.е.
т.е.  . (12.16.)
. (12.16.)
Соответственно увеличивается сила тяги лопасти, которая пропорциональная квадрату скорости набегающего потока и момент тяги этой лопасти относительно горизонтального шарнира. Лопасть взмахивает вверх,  Рис12.9 Выравнивания момента силы тяги в различных азимутальных положениях лопасти.
Рис12.9 Выравнивания момента силы тяги в различных азимутальных положениях лопасти.
сечение лопасти дополнительно обдуваются сверху (рис. 12.10), а это вызывает уменьшение истинных углов атаки и уменьшение подъёмной силы лопасти, что приводит к аэродинамической компенсации взмаха. При движении от ψ 90 до ψ 180 скорость обтекания лопастей уменьшается, углы атаки увеличиваются. На азимуте ψ = 180 о и на ψ = 0 о скорости обтекания лопасти одинаковы и равны ωr.
К азимуту ψ = 270 о лопасть начинает опускаться в связи с уменьшением скорости обтекания и уменьшением Т л, при этом лопасти дополнительно обдуваются снизу, что вызывает увеличение углов атаки элемента лопасти, а значит и некоторый прирост подъёмной силы.
На ψ = 270 скорость обтекания лопасти минимальна, мах Vy лопасти вниз максимальный, углы атаки на концах лопастей близки к критическим. Вследствие различия скорости обтекания лопасти на различных азимутах, углы атаки на ψ = 270 о возрастают в несколько раз больше, чем уменьшаются при ψ = 90 о. Поэтому при увеличении скорости полета вертолета, в районе азимута ψ = 270 о углы атаки могут превышать критические значения, что вызывает срыв потока с элементов лопасти.
Косое обтекание приводит к тому, что углы взмаха лопастей в передней части диска НВ в районе азимута 180 0 значительно больше, чем в задней части диска в районе азимута 0 0 . Этот наклон диска называется завалом конуса НВ. Изменение углов взмаха лопасти по азимуту на свободном НВ, когда отсутствует регулятор взмаха, изменяются следующим образом:
азимут от 0 до 90 0:
Результирующая скорость обтекания лопасти растет, подъемная сила и ее момент увеличиваются;
Угол взмаха b и вертикальная скорость V у увеличиваются;
азимут 90 0:
Скорость взмаха вверх V у максимальная;
азимут 90 0 – 180 0:
Подъемная сила лопасти уменьшается за счет уменьшения результирующей скорости обтекания;
Скорость взмаха V у вверх уменьшается, но угол взмаха лопасти продолжает увеличиваться.
азимут 200 0 – 210 0:
Вертикальная скорость взмаха равна нулю V у = 0, угол взмаха лопасти b - максимальный, лопасть, в результате уменьшения подъёмной силы, идёт вниз;
азимут 270 0:
Скорость обтекания лопасти минимальная, подъемная сила и ее момент уменьшаются;
Скорость маха вниз V у – максимальная;
Угол взмаха b уменьшается.
азимут 20 0 – 30 0:
Скорость обтекания лопасти начинает увеличиваться;
V у = 0, угол взмаха вниз – максимальный.
Таким образом, у свободного НВ правого вращения при косой обдувке конус заваливается назад влево. С ростом скорости полёта завал конуса увеличивается.

Рис.12.10.Изменение углов атаки элемента лопасти за счет взмаха.
Регулятор взмаха (РВ). Маховое движение приводит к росту динамических нагрузок на конструкцию лопасти и неблагоприятному изменению углов атаки лопастей по диску несущего винта. Уменьшение амплитуды взмаха и изменение естественного наклона конуса НВ с левого на правое производится регулятором взмаха. Регулятором взмаха (рис.12.11.) является кинематическая связь между осевым шарниром и вращающимся кольцом автомата перекоса, обеспечивающая уменьшение углов установки лопастей j при уменьшении угла взмаха b и наоборот, увеличение угла установки лопастей при увеличении угла взмаха. Эта связь заключается в смещении точки крепления тяги от автомата перекоса к поводку осевого шарнира (точка А) (рис.12.12) с оси горизонтального шарнира. На вертолетах типа Ми регулятор взмаха заваливает конус НВ назад и вправо. В этом случае боковая составляющая по оси Z от результирующей силы НВ направлена вправо против направления тяги рулевого винта, что улучшает условия боковой балансировки вертолета.

Рис.12.11 Регулятор взмаха, Кинематическая схема. . . Равновесие лопасти относительно горизонтального шарнира.
При маховом движении лопасти (рис.12.12.) в плоскости силы тяги на нее действуют следующие силы и моменты:
Тяга Т л, приложена на ¾ длины лопасти, образует момент М т =Т·а, поворачивающий лопасть на увеличение взмаха;
Центробежная сила F цб действующая перпендикулярно конструктивного оси вращения НВ во внешнюю сторону. Сила инерции от взмаха лопасти, направленная перпендикулярно оси лопасти и противоположна ускорению взмаха;
Сила тяжести G л приложена к центру тяжести лопасти и образует момент М G =G·в поворачивающий лопасть на уменьшение взмаха.
Лопасть занимает положение в пространстве вдоль результирующей силы Rл. Условия равновесия лопасти относительно горизонтального шарнира определяется выражением
 (12.17.)
(12.17.)
Рис.12.12. Силы и моменты, действующие на лопасть в плоскости взмаха.
Лопасти НВ движутся по образующей конуса, вершина которого расположена в центре втулки, а ось перпендикулярна к плоскости концов лопастей.
Каждая лопасть занимает на определенном азимуте Ψ одинаковые угловые положения β л относительно плоскости вращения НВ.
Маховое движение лопастей является циклическим, строго повторяющимся с периодом равным времени одного оборота НВ.
Момент горизонтальных шарниров втулки НВ (М гш).
На режиме осевого обтекания НВ равнодействующая сил лопастей R н направлена вдоль оси НВ и приложена в центре втулки. На режиме косой обдувки сила R н отклоняется в сторону завала конуса. Из-за разноса горизонтальных шарниров аэродинамическая сила R н не проходит через центр втулки и между вектором силы R н и центром втулки образуется плечо. Возникает момент М гш, называемый инерционным моментом горизонтальных шарниров втулки НВ. Он зависит от разноса l r горизонтальных шарниров. Момент горизонтальных шарниров втулки НВ М гш увеличивается с увеличением расстояния l r и направлен в сторону завала конуса НВ.
Наличие разноса горизонтальных шарниров улучшает демпфирующее свойство НВ, т.е. улучшает динамическую устойчивость вертолета.
Равновесие лопасти относительно вертикального шарнира (ВШ).
Во время вращения НВ лопасть отклоняется на угол x. Угол качания x измеряется между радиальной линией и продольной осью лопасти в плоскости вращения НВ и будет положительным, если лопасть поворачивается относительно радиальной линии назад (отстает) (рис. 12.13.).
В среднем угол качания равен 5-10 о, а на режиме самовращения он отрицателен и равен 8-12 о в плоскости вращения НВ. На лопасть действуют следующие силы:
Сила лобового сопротивления Х л, приложена в центре давления;
Центробежная сила, направленная по прямой соединяющей центр массы лопасти и ось вращения НВ;
Инерционная сила F ин, направленная перпендикулярно оси лопасти и противоположно ускорению, приложена в центре масс лопасти;
Знакопеременные силы Кориолиса F к, приложенные в центре масс лопасти.
Возникновение силы Кориолиса объясняется законом сохранения энергии.
Энергия вращения зависит от радиуса,если радиус уменьшился, то часть энергии используется на увеличение угловой скорости вращения.
Поэтому, когда происходит взмах лопасти вверх, уменьшаются радиус r ц2 центра масс лопасти и окружная скорость, появляется кориолисово ускорение, стремящиеся ускорить вращение, а значит и сила - сила Кориолиса, которая поворачивает лопасть вперёд относительно вертикального шарнира. При уменьшении угла взмаха кориолисово ускорение,а значит,и сила будет направлена против вращения. Сила Кориолиса прямо пропорциональна весу лопасти, частоте вращения НВ, угловой скорости взмаха и углу взмаха
Выше перечисленные силы образуют моменты, которые на каждом азимуте похождения лопасти должны быть уравновешены
 . (12.15.)
. (12.15.)

Рис.12.13.. Равновесие лопасти относительно вертикального шарнира (ВШ).
Возникновение моментов на НВ.
При работе НВ возникают следующие моменты:
Крутящий момент М к, создается силами аэродинамического сопротивления лопастей, определяется параметрами НВ;
Реактивный момент М р, приложен к главному редуктору и через раму редуктора на фюзеляже.;
Крутящий момент двигателей, передаваемый через главный редуктор на вал НВ, определяется крутящим моментом двигателей.
Крутящий момент двигателей направлен по вращению НВ, а реактивный и крутящий момент НВ – против вращения. Крутящий момент двигателя определяется расходом топлива, программой автоматического регулирования, внешними атмосферными условиями.
На установившихся режимах полета М к = М р = - М дв.
Крутящий момент НВ иногда отождествляют с реактивным моментом НВ или с крутящим моментом двигателей, но как видно из выше приведенного физическая сущность этих моментов различна.
Критические зоны обтекания НВ.
При косой обдувке на НВ, образуются следующие критические зоны (рис. 12.14.):
Зона обратного обтекания;
Зона срыва потока;
Зона волнового кризиса;
Зона обратного обтекания . В районе азимута 270 0 в горизонтальном полете образуется зона, в которой комлевые сечения лопастей обтекаются не с передней, а с задней кромки лопасти. Участок лопасти находящийся в этой зоне в создании подъемной силы лопасти не участвует. Эта зона зависит от скорости полёта, чем больше скорость полета, тем больше зона обратного обтекания.
Зона срыва потока. В полете на азимуте 270 0 – 300 0 на концах лопастей за счет маха лопасти вниз увеличиваются углы атаки сечения лопасти. Этот эффект усиливается при увеличении скорости полета вертолета, т.к. при этом возрастают скорость и амплитуда махового движения лопастей. При значительном увеличении шага НВ или увеличении скорости полета, в этой зоне происходит срыв потока (рис. 12.14.) за счёт выхода лопастей на закритические углы атаки, что приводит к уменьшению подъёмной силы и увеличению лобового сопротивления лопастей, находящихся в этой зоне. Тяга несущего винта в этом секторе падает и при большом превышении скорости полёта на НВ появляется значительный кренящий момент.
Зона волнового кризиса. Волновое сопротивление на лопасти возникает в районе азимута 90 0 на большой скорости полета, когда скорость обтекания лопасти достигает местной скорости звука, и образуются местные скачки уплотнения, что вызывает резкое увеличение коэффициента С хо за счет возникновения волнового сопротивления
С хо =С хтр +С хв. (12.18.)
Волновое сопротивление может в несколько раз превосходить сопротивление трения, а т.к. скачки уплотнения на каждой лопасти появляются циклически и на небольшой промежуток времени, то это вызывает вибрацию лопасти, которая увеличивается с ростом скорости полета. Критические зоны обтекания несущего винта уменьшают эффективную площадь несущего винта, а значит и тягу НВ, ухудшают аэродинамические и эксплутационные характеристики вертолёта в целом, поэтому ограничения полётов вертолётов по скорости связаны с рассмотренными явлениями.
.«Вихревое кольцо».
Режим вихревого кольца возникает при малой горизонтальной скорости и большой вертикальной скорости снижения вертолета при работающих двигателях вертолета.
При снижении вертолёта в таком режиме, на некотором расстоянии под НВ образуется поверхность а-а, где индуктивная скорость отбрасывания становится равной скорости снижения V y (рис.12.15). Достигая этой поверхности, индуктивный поток поворачивается навстречу НВ, частично им захватывается и снова отбрасывается вниз. При увеличении V y , поверхность а-а приближается к НВ, и при некоторой критической скорости снижения почти весь отбрасываемый воздух снова подсасывается несущим винтом, образуя вокруг винта вихревой тор. Наступает режим вихревого кольца.

Рис12.14. Критические зоны обтекания НВ.
В этом случае общая тяга НВ уменьшается, вертикальная скорость снижения V y возрастает. Поверхность раздела а-а периодически разрывается, вихри тора резко изменяют распределение аэродинамической нагрузки и характер махового движения лопастей. В результате тяга НВ становится пульсирующей, возникает тряска и броски вертолета, ухудшается эффективность управления, указатель скорости и вариометр дают неустойчивые показания.
Чем меньше установочный угол лопастей и скорость горизонтального полета, больше вертикальная скорость снижения тем интенсивнее проявляется режим вихревого кольца. снижения на скоростях полета от 40 км/час и менее.
Для предотвращения попадание вертолета в режим «вихревого кольца» необходимо выполнять требования РЛЭ по ограничению вертикальной скорости